
ImageTailor User Guide
- Introduction
- Installation
- Image Customization
Introduction
In addition to the kernel, an operating system contains various peripheral packages. These peripheral packages provide functions of a general-purpose operating system but also cause the following problems:
- A large number of resources (such as memory, disks, and CPUs) are occupied, resulting in low system performance.
- Unnecessary functions increase the development and maintenance costs.
To address these problems, openEuler provides the imageTailor tool for tailoring and customization images. You can tailor unnecessary peripheral packages in the OS image or add service packages or files as required. This tool includes the following functions:
- System package tailoring: Tailors system commands, libraries, and drivers based on the list of RPM packages to be installed.
- System configuration modification: Configures the host name, startup services, time zone, network, partitions, drivers to be loaded, and kernel version.
- Software package addition: Adds custom RPM packages or files to the system.
Installation
This section uses openEuler 22.03 LTS in the AArch64 architecture as an example to describe the installation method.
Software and Hardware Requirements
The software and hardware requirements of imageTailor are as follows:
The architecture is x86_64 or AArch64.
The OS is openEuler 22.03 LTS (the kernel version is 5.10 and the Python version is 3.9, which meet the tool requirements).
The root directory / of the host to run the tool have at least 40 GB space.
The Python version is 3.9 or later.
The kernel version is 5.10 or later.
The SElinux service is disabled.
$ sudo setenforce 0 $ getenforce Permissive
Obtaining the Installation Package
Download the openEuler release package to install and use imageTailor.
Obtain the ISO image file and the corresponding verification file.
The image must be an everything image. Assume that the image is to be stored in the root directory. Run the following commands:
sudo wget https://repo.openeuler.org/openEuler-22.03-LTS-SP2/ISO/aarch64/openEuler-22.03-LTS-SP2-everything-aarch64-dvd.iso -O /root/temp/openEuler-22.03-LTS-SP2-everything-aarch64-dvd.iso sudo wget https://repo.openeuler.org/openEuler-22.03-LTS-SP2/ISO/aarch64/openEuler-22.03-LTS-SP2-everything-aarch64-dvd.iso.sha256sum -O /root/temp/openEuler-22.03-LTS-SP2-everything-aarch64-dvd.iso.sha256sumObtain the verification value in the sha256sum verification file.
sudo cat /root/temp/openEuler-22.03-LTS-SP2-everything-aarch64-dvd.iso.sha256sumCalculate the verification value of the ISO image file.
sudo sha256sum /root/temp/openEuler-22.03-LTS-SP2-everything-aarch64-dvd.isoCompare the verification value in the sha256sum file with that of the ISO image. If they are the same, the file integrity is verified. Otherwise, the file integrity is damaged. You need to obtain the file again.
Installing imageTailor
The following uses openEuler 22.03 LTS in AArch64 architecture as an example to describe how to install imageTailor.
Ensure that openEuler 22.03 LTS (or a running environment that meets the requirements of imageTailor) has been installed on the host.
$ cat /etc/openEuler-release openEuler release 22.03 LTSCreate a /etc/yum.repos.d/local.repo file to configure the Yum repository. The following is an example of the configuration file. baseurl indicates the directory for mounting the ISO image.
[local] name=local baseurl=file:///root/imageTailor_mount gpgcheck=0 enabled=1Run the following commands as the root user to mount the image to the /root/imageTailor_mount directory as the Yum repository (ensure that the value of baseurl is the same as that configured in the repo file and the disk space of the directory is greater than 20 GB):
sudo mkdir /root/imageTailor_mount sudo mount -o loop /root/temp/openEuler-22.03-LTS-everything-aarch64-dvd.iso /root/imageTailor_mount/Make the Yum repository take effect.
yum clean all sudo yum makecacheInstall the imageTailor tool as the root user.
sudo yum install -y imageTailorRun the following command as the root user to verify that the tool has been installed successfully:
$ cd /opt/imageTailor/ $ sudo ./mkdliso -h ------------------------------------------------------------------------------------------------------------- Usage: mkdliso -p product_name -c configpath [--minios yes|no|force] [-h] [--sec] Options: -p,--product Specify the product to make, check custom/cfg_yourProduct. -c,--cfg-path Specify the configuration file path, the form should be consistent with custom/cfg_xxx --minios Make minios: yes|no|force --sec Perform security hardening -h,--help Display help information Example: command: ./mkdliso -p openEuler -c custom/cfg_openEuler --sec ./mkdliso -p docker -c custom/cfg_docker ./mkdliso -p EMB_rootfs -c custom/cfg_EMB_rootfs ./mkdliso -p qcow2 -c custom/cfg_qcow2 help: ./mkdliso -h -------------------------------------------------------------------------------------------------------------
Directory Description
After imageTailor is installed, the directory structure of the tool package is as follows
openEuler environment
[imageTailor] |-[custom] |-[cfg_openEuler] |-[usr_file] // Stores files to be added |-[usr_install] //Stores hook scripts to be added |-[all] |-[conf] |-[hook] |-[cmd.conf] // Configures the default commands and libraries used by an ISO image |-[rpm.conf] // Configures the list of RPM packages and drivers installed by default for an ISO image |-[security_s.conf] // Configures security hardening policies |-[sys.conf] // Configures ISO image system parameters |-[kiwi] // Basic configurations of imageTailor |-[repos] //RPM sources for obtaining the RPM packages required for creating an ISO image |-[security-tool] // Security hardening tool |-mkdliso // Executable script for creating an ISO imageDocker environment
[imageTailor] |-[custom] |-[cfg_docker] |-[config.xml] // Configures the list of RPM packages and repositories installed by default for an ISO image |-[env.pm] |-[group] |-[images.sh] // Tailoring script |-[passwd] |-[kiwi] // Basic configurations of imageTailor |-[repos] // RPM sources for obtaining the RPM packages required for creating an ISO image |-[security-tool] // Security hardening tool |-mkdliso // Executable script for creating an ISO imageEMB_rootfs environment
[imageTailor]
|-[custom]
|-[cfg_EMB_rootfs]
|-[usr_install] // User hook scripts
|-[conf]
|-[isopackage.sdf]
|-[menu.lst]
|-[modules]
|-[cmd.conf] // Configures the default commands and libraries used by an ISO image
|-[rpm.conf] // Configures the list of RPM packages and drivers installed by default for an ISO image
|-[security_s.conf] // Configures security hardening policies
|-[sys.conf] // Configures ISO image system parameters
|-[kiwi] // Basic configurations of imageTailor
|-[repos] // RPM sources for obtaining the RPM packages required for creating an ISO image
|-[security-tool] // Security hardening tool
|-mkdliso // Executable script for creating an ISO image
- QCOW2 environment
[imageTailor]
|-[custom]
|-[cfg_qcow2]
|-[bin] // Command scripts
|-[create-image] // Image creation entry
|-[source_files] // Script invocation entry
|-[config] // Configurations
|-[grub.cfg] // Grub configurations
|-[repo] // Repositories
|-[root_pwd] // Root password
|-[rpmlist] // Software package list
|-[hooks] // hook scripts
|-[lib] // Common scripts
|-[misc] // Public scripts
|-[template]
|-[kiwi] // Basic configurations of imageTailor
|-[repos] // RPM sources for obtaining the RPM packages required for creating an ISO image
|-[security-tool] // Security hardening tool
|-mkdliso // Executable script for creating an ISO image
Image Customization
This section describes how to use the imageTailor tool to package the service RPM packages, custom files, drivers, commands, and libraries to the target ISO image.
Overall Process
The following figure shows the process of using imageTailor to customize an image.
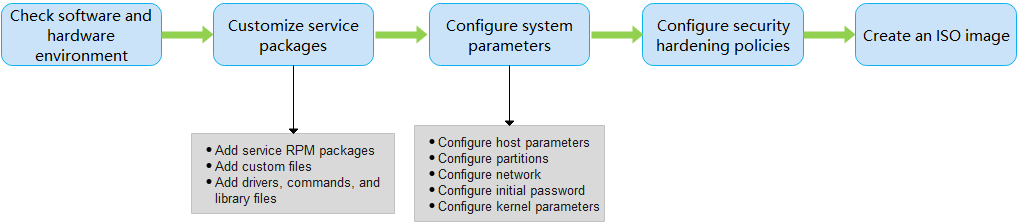
The steps are described as follows:
Check software and hardware environment: Ensure that the host for creating the ISO image meets the software and hardware requirements.
Customize service packages: Add RPM packages (including service RPM packages, commands, drivers, and library files) and files (including custom files, commands, drivers, and library files).
- Adding service RPM packages: Add RPM packages to the ISO image as required. For details, see Installation.
- Adding custom files: If you want to perform custom operations such as hardware check, system configuration check, and driver installation when the target ISO system is installed or started, you can compile custom files and package them to the ISO image.
- Adding drivers, commands, and library files: If the RPM package source of openEuler does not contain the required drivers, commands, or library files, you can use imageTailor to package the corresponding drivers, commands, or library files into the ISO image.
Configure system parameters:
- Configuring host parameters: To ensure that the ISO image is successfully installed and started, you need to configure host parameters.
- Configuring partitions: You can configure service partitions based on the service plan and adjust system partitions.
- Configuring the network: You can set system network parameters as required, such as the NIC name, IP address, and subnet mask.
- Configuring the initial password: To ensure that the ISO image is successfully installed and started, you need to configure the initial passwords of the root user and GRUB.
- Configuring kernel parameters: You can configure the command line parameters of the kernel as required.
Configure security hardening policies.
ImageTailor provides default security hardening policies. You can modify security_s.conf (in the ISO image customization phase) to perform secondary security hardening on the system based on service requirements. For details, see the Security Hardening Guide.
Create an ISO image:
Use the imageTailor tool to create an ISO image.
Customizing Service Packages
You can pack service RPM packages, custom files, drivers, commands, and library files into the target ISO image as required.
Setting a Local Repo Source
To customize an ISO image, you must set a repo source in the /opt/imageTailor/repos/euler_base/ directory. This section describes how to set a local repo source.
Download the ISO file released by openEuler. (The RPM package of the everything image released by the openEuler must be used.)
cd /opt wget https://repo.openeuler.org/openEuler-22.03-LTS/ISO/aarch64/openEuler-22.03-LTS-everything-aarch64-dvd.isoCreate a mount directory /opt/openEuler_repo and mount the ISO file to the directory.
$ sudo mkdir -p /opt/openEuler_repo $ sudo mount openEuler-22.03-LTS-everything-aarch64-dvd.iso /opt/openEuler_repo mount: /opt/openEuler_repo: WARNING: source write-protected, mounted read-only.Copy the RPM packages in the ISO file to the /opt/imageTailor/repos/euler_base/ directory.
$ sudo rm -rf /opt/imageTailor/repos/euler_base && sudo mkdir -p /opt/imageTailor/repos/euler_base $ sudo cp -ar /opt/openEuler_repo/Packages/* /opt/imageTailor/repos/euler_base $ sudo chmod -R 644 /opt/imageTailor/repos/euler_base $ sudo ls /opt/imageTailor/repos/euler_base|wc -l 2577 $ sudo umount /opt/openEuler_repo && sudo rm -rf /opt/openEuler_repo $ cd /opt/imageTailor
Adding Files
You can add files to an ISO image as required. The file types include custom files, drivers, commands, or library file. Store the files to the /opt/imageTailor/custom/cfg_openEuler/usr_file directory.
Precautions
The commands to be packed must be executable. Otherwise, imageTailor will fail to pack the commands into the ISO.
The file stored in the /opt/imageTailor/custom/cfg_openEuler/usr_file directory will be generated in the root directory of the ISO. Therefore, the directory structure of the file must be a complete path starting from the root directory so that imageTailor can place the file in the correct directory.
For example, if you want file1 to be in the /opt directory of the ISO, create an opt directory in the usr_file directory and copy file1 to the opt directory. For example:
$ pwd /opt/imageTailor/custom/cfg_openEuler/usr_file $ tree . ├── etc │ ├── default │ │ └── grub │ └── profile.d │ └── csh.precmd └── opt └── file1 4 directories, 3 filesThe paths in /opt/imageTailor/custom/cfg_openEuler/usr_file must be real paths. For example, the paths do not contain soft links. You can run the
realpathorreadlink -fcommand to query the real path.If you need to invoke a custom script in the system startup or installation phase, that is, a hook script, store the file in the hook directory.
Adding RPM Packages
Procedure
To add RPM packages (drivers, commands, or library files) to an ISO image, perform the following steps:
NOTE:
- The rpm.conf and cmd.conf files are stored in the /opt/imageTailor/custom/cfg_openEuler/ directory.
- The RPM package tailoring granularity below indicates sys_cut='no'. For details about the cutout granularity, see Configuring Host Parameters.
- If no local repo source is configured, configure a local repo source by referring to Setting a Local Repo Source.
Check whether the /opt/imageTailor/repos/euler_base/ directory contains the RPM package to be added.
- If yes, go to step 2.
- If no, go to step 3.
Configure the RPM package information in the <bootstrap> section in the rpm.conf file.
- For the RPM package tailoring granularity, no further action is required.
- For other tailoring granularities, go to step 4.
Obtain the RPM package and store it in the /opt/imageTailor/custom/cfg_openEuler/usr_rpm directory. If the RPM package depends on other RPM packages, store the dependency packages to this directory because the added RPM package and its dependent RPM packages must be packed into the ISO image at the same time.
- For the RPM package tailoring granularity, go to step 4.
- For other tailoring granularities, no further action is required.
Configure the drivers, commands, and library files to be retained in the RPM package in the rpm.conf and cmd.conf files. If there are common files to be tailored, configure them in the <strip type="delete"></strip> section in the cmd.conf file.
Configuration File Description
| Operation | Configuration File | Section |
|---|---|---|
| Adding drivers | rpm.conf | <drivers> <file name="{driver_name}"> </drivers> Note: The driver_name is the relative path of /lib/modules/{kernel_version_number}/kernel/. |
| Adding commands | cmd.conf | <strip type="tools"> <file name="{command_name}"> </strip> |
| Adding library files | cmd.conf | <strip type="libs"> <file name="{library_file_name}"> </strip> |
| Deleting other files | cmd.conf | <strip type="delete"> <file name="{file_name}"> </strip> Note: The file name must be an absolute path. |
Example
Adding drivers
<drivers> <file name="arch/arm64/crypto/aes-ce-blk.ko"/> <file name="arch/arm64/crypto/aes-ce-ccm.ko"/> <file name="arch/arm64/crypto/aes-ce-cipher.ko"/> ...... </drivers>Adding commands
<strip type="tools"> <file name="aarch64-openEuler-linux-gnu-pkg-config"/> <file name="accessdb"/> <file name="acyclic"/> ...... </strip>Adding library files
<strip type="tools"> <file name="ANSI_X3.110"/> <file name="ARMSCII-8"/> <file name="ASMO_449"/> </strip>Deleting other files
<strip type="delete"> <file name="/usr/lib/firmware/radeon"/> <file name="/usr/lib/firmware/rtlwifi"/> <file name="/usr/lib/firmware/RTL8192E"/> </strip>
Adding Hook Scripts
A hook script is invoked by the OS during startup and installation to execute the actions defined in the script. The directory for storing hook scripts of imageTailor is custom/cfg_openEuler/usr_install/hook directory, which has different subdirectories. Each subdirectory represents an OS startup or installation phase. Store the scripts based on the phases in which the scripts are invoked. This operation is not available in the Docker environment.
Script Naming Rule
The script name must start with S+number (the number must be at least two digits). The number indicates the execution sequence of the hook script. Example: S01xxx.sh
The scripts in the hook directory are executed using the
sourcecommand. Therefore, exercise caution when using theexitcommand in the scripts because the entire installation script exits after theexitcommand is executed.
Description of hook Subdirectories
| Subdirectory | Script Example | Time for Execution | Description |
|---|---|---|---|
| insmod_drv_hook | N/A | After OS drivers are loaded | N/A |
| custom_install_hook | S01custom_install.sh | After the drivers are loaded, that is, after insmod_drv_hook is executed | You can customize the OS installation process by using a custom script. |
| env_check_hook | S01check_hw.sh | Before the OS installation initialization | The script is used to check hardware specifications and types before initialization. |
| set_install_ip_hook | S01set_install_ip.sh | When network configuration is being performed during OS installation initialization. | You can customize the network configuration by using a custom script. |
| before_partition_hook | S01checkpart.sh | Before partitioning | You can check correctness of the partition configuration file by using a custom script. |
| before_setup_os_hook | N/A | Before the repo file is decompressed | You can customize partition mounting. If the decompression path of the installation package is not the root partition specified in the partition configuration, customize partition mounting and assign the decompression path to the input global variable. |
| before_mkinitrd_hook | S01install_drv.sh | Before the mkinitrd command is run | The hook script executed before running the mkinitrd command when initrd is saved to the disk. You can add and update driver files in initrd. |
| after_setup_os_hook | N/A | After OS installation | After the installation is complete, you can perform custom operations on the system files, such as modifying grub.cfg. |
| install_succ_hook | N/A | When the OS is successfully installed | The scripts in this subdirectory are used to parse the installation information and send information of whether the installation succeeds.install_succ_hook cannot be set to install_break. |
| install_fail_hook | N/A | When the OS installation fails | The scripts in this subdirectory are used to parse the installation information and send information of whether the installation succeeds.install_fail_hook cannot be set to install_break. |
Configuring System Parameters
Before creating an ISO image, you need to configure system parameters, including host parameters, initial passwords, partitions, network, compilation parameters, and system command line parameters.
Configuring Host Parameters
The <sysconfig> </sysconfig> section in the /opt/imageTailor/custom/cfg_openEuler/sys.conf file is used to configure common system parameters, such as the host name and kernel boot parameters. This operation is not available in the Docker environment.
The default configuration provided by openEuler is as follows. You can modify the configuration as required.
<sysconfig>
sys_service_enable='ipcc'
sys_service_disable='cloud-config cloud-final cloud-init-local cloud-init'
sys_utc='yes'
sys_timezone=''
sys_cut='no'
sys_usrrpm_cut='no'
sys_hostname='Euler'
sys_usermodules_autoload=''
sys_gconv='GBK'
</sysconfig>
The parameters are described as follows:
sys_service_enable
This parameter is optional. Services enabled by the OS by default. Separate multiple services with spaces. If you do not need to add a system service, use the default value ipcc. Pay attention to the following during the configuration:
- Default system services cannot be deleted.
- You can configure service-related services, but the repo source must contain the service RPM package.
- By default, only the services configured in this parameter are enabled. If a service depends on other services, you need to configure the depended services in this parameter.
sys_service_disable
This parameter is optional. Services that are not allowed to automatically start upon system startup. Separate multiple services with spaces. If no system service needs to be disabled, leave this parameter blank.
sys_utc
(Mandatory) Indicates whether to use coordinated universal time (UTC) time. The value can be yes or no. The default value is yes.
sys_timezone
This parameter is optional. Sets the time zone. The value can be a time zone supported by openEuler, which can be queried in the /usr/share/zoneinfo/zone.tab file.
sys_cut
(Mandatory) Indicates whether to tailor the RPM packages. The value can be yes, no, or debug.yes indicates that the RPM packages are tailored. no indicates that the RPM packages are not tailored (only the RPM packages in the rpm.conf file is installed). debug indicates that the RPM packages are tailored but the
rpmcommand is retained for customization after installation. The default value is no. NOTE:- imageTailor installs the RPM package added by the user, deletes the files configured in the <script type="delete"></script> section of the cmd.conf file, and then deletes the commands, libraries, and drivers that are not configured in cmd.conf or rpm.conf.
- When sys_cut='yes' is configured, imageTailor does not support the installation of the
rpmcommand. Even if therpmcommand is configured in the rpm.conf file, the configuration does not take effect.
sys_usrrpm_cut
(Mandatory) Indicates whether to tailor the RPM packages added by users to the /opt/imageTailor/custom/cfg_openEuler/usr_rpm directory. The value can be yes or no. The default value is no.
sys_usrrpm_cut='yes': imageTailor installs the RPM packages added by the user, deletes the file configured in the <script type="delete"></script> section in the cmd.conf file, and then deletes the commands, libraries, and drivers that are not configured in cmd.conf or rpm.conf.
sys_usrrpm_cut='no': imageTailor installs the RPM packages added by the user but does not delete the files in the RPM packages.
sys_hostname
(Mandatory) Host name. After the OS is deployed in batches, you are advised to change the host name of each node to ensure that the host name of each node is unique.
The host name must be a combination of letters, digits, and hyphens (-) and must start with a letter or digit. Letters are case sensitive. The value contains a maximum of 63 characters. The default value is Euler.
sys_usermodules_autoload
(Optional) Driver loaded during system startup. When configuring this parameter, you do not need to enter the file extension .ko. If there are multiple drivers, separate them by space. By default, this parameter is left blank, indicating that no additional driver is loaded.
sys_gconv
(Optional) This parameter is used to tailor /usr/lib/gconv and /usr/lib64/gconv. The options are as follows:
- null/NULL: indicates that this parameter is not configured. If sys_cut='yes' is configured, /usr/lib/gconv and /usr/lib64/gconv will be deleted.
- all/ALL: keeps /usr/lib/gconv and /usr/lib64/gconv.
- xxx,xxx: keeps the corresponding files in the /usr/lib/gconv and /usr/lib64/gconv directories. If multiple files need to be kept, use commas (,) to separate them.
sys_man_cut
(Optional) Indicates whether to tailor the man pages. The value can be yes or no. The default value is yes.
If both sys_cut and sys_usrrpm_cut are configured, sys_cut is used. The following rules apply:
sys_cut='no'
No matter whether sys_usrrpm_cut is set to yes or no, the system RPM package tailoring granularity is used. That is, imageTailor installs the RPM packages in the repo source and the RPM packages in the usr_rpm directory, however, the files in the RPM package are not deleted. Even if some files in the RPM packages are not required, imageTailor will delete them.
sys_cut='yes'
- sys_usrrpm_cut='no'
System RPM package tailoring granularity: imageTailor deletes files in the RPM packages in the repo sources as configured.
- sys_usrrpm_cut='yes'
System and user RPM package tailoring granularity: imageTailor deletes files in the RPM packages in the repo sources and the usr_rpm directory as configured.
Configuring Initial Passwords
The root and GRUB passwords must be configured during OS installation. Otherwise, you cannot log in to the OS as the root user after the OS is installed using the tailored ISO image. This section describes how to configure the initial passwords. This operation is not available in the Docker environment.
You must configure the initial root and GRUB passwords manually.
Configuring the Initial Password of the root User
Introduction
The initial password of the root user is stored in the /opt/imageTailor/custom/cfg_openEuler/rpm.conf file. You can modify this file to set the initial password of the root user.
- If the
--minios yes/forceparameter is required when you run themkdlisocommand to create an ISO image, you need to enter the corresponding information in the /opt/imageTailor/kiwi/minios/cfg_minios/rpm.conf file.
The default configuration of the initial password of the root user in the /opt/imageTailor/custom/cfg_openEuler/rpm.conf file is as follows. Add a password of your choice.
<users group="root">
<user pwd="${pwd}" home="/root" name="root"/>
</users>
The parameters are described as follows:
- group: group to which the user belongs.
- pwd: ciphertext of the initial password. The encryption algorithm is SHA-512. Replace ${pwd} with the actual ciphertext.
- home: home directory of the user.
- name: name of the user to be configured.
Modification Method
Before creating an ISO image, you need to change the initial password of the root user. The following describes how to set the initial password of the root user (root permissions are required):
Add a user for generating a password, for example, testUser.
sudo useradd testUserSet the password of testUser. Run the following command and set the password as prompted:
$ sudo passwd testUser Changing password for user testUser. New password: Retype new password: passwd: all authentication tokens updated successfully.View the /etc/shadow file. The content following testUser (string between two colons) is the ciphertext of the password.
$ sudo cat /etc/shadow | grep testUser testUser:$6$YkX5uFDGVO1VWbab$jvbwkZ2Kt0MzZXmPWy.7bJsgmkN0U2gEqhm9KqT1jwQBlwBGsF3Z59heEXyh8QKm3Qhc5C3jqg2N1ktv25xdP0:19052:0:90:7:35::Copy and paste the ciphertext to the pwd field in the /opt/imageTailor/custom/cfg_openEuler/rpm.conf file.
<users group="root"> <user pwd="$6$YkX5uFDGVO1VWbab$jvbwkZ2Kt0MzZXmPWy.7bJsgmkN0U2gEqhm9KqT1jwQBlwBGsF3Z59heEXyh8QKm3Qhc5C3jqg2N1ktv25xdP0" home="/root" name="root"/> </users>If the
--minios yes/forceparameter is required when you run themkdlisocommand to create an ISO image, configure the pwd field of the corresponding user in /opt/imageTailor/kiwi/minios/cfg_minios/rpm.conf.<users group="root"> <user pwd="$6$YkX5uFDGVO1VWbab$jvbwkZ2Kt0MzZXmPWy.7bJsgmkN0U2gEqhm9KqT1jwQBlwBGsF3Z59heEXyh8QKm3Qhc5C3jqg2N1ktv25xdP0" home="/root" name="root"/> </users>
Configuring the Initial GRUB Password
The initial GRUB password is stored in the /opt/imageTailor/custom/cfg_openEuler/usr_file/etc/default/grub file. Modify this file to configure the initial GRUB password. If the initial GRUB password is not configured, the ISO image will fail to be created.
The root permissions are required for configuring the initial GRUB password.
The default user corresponding to the GRUB password is root.
The
grub2-set-passwordcommand must exist in the system. If the command does not exist, install it in advance.
Run the following command and set the GRUB password as prompted:
$ sudo grub2-set-password -o ./ Enter password: Confirm password: grep: .//grub.cfg: No such file or directory WARNING: The current configuration lacks password support! Update your configuration with grub2-mkconfig to support this feature.After the command is executed, the user.cfg file is generated in the current directory. The content starting with grub.pbkdf2.sha512 is the encrypted GRUB password.
$ sudo cat user.cfg GRUB2_PASSWORD=grub.pbkdf2.sha512.10000.CE285BE1DED0012F8B2FB3DEA38782A5B1040FEC1E49D5F602285FD6A972D60177C365F1 B5D4CB9D648AD4C70CF9AA2CF9F4D7F793D4CE008D9A2A696A3AF96A.0AF86AB3954777F40D324816E45DD8F66CA1DE836DC7FBED053DB02 4456EE657350A27FF1E74429546AD9B87BE8D3A13C2E686DD7C71D4D4E85294B6B06E0615Copy the preceding ciphertext and add the following configuration to the /opt/imageTailor/custom/cfg_openEuler/usr_file/etc/default/grub file:
GRUB_PASSWORD="grub.pbkdf2.sha512.10000.CE285BE1DED0012F8B2FB3DEA38782A5B1040FEC1E49D5F602285FD6A972D60177C365F1 B5D4CB9D648AD4C70CF9AA2CF9F4D7F793D4CE008D9A2A696A3AF96A.0AF86AB3954777F40D324816E45DD8F66CA1DE836DC7FBED053DB02 4456EE657350A27FF1E74429546AD9B87BE8D3A13C2E686DD7C71D4D4E85294B6B06E0615"
Configuring Partitions
If you want to adjust system partitions or service partitions, modify the <HDpartitions > section in the /opt/imageTailor/custom/cfg_openEuler/sys.conf file. This operation is not available in the Docker environment.
- System partition: partition for storing the OS.
- Service partition: partition for service data.
- The type of a partition is determined by the content it stores, not the size, mount path, or file system.
- Partition configuration is optional. You can manually configure partitions after OS installation.
The format of <HDpartitions> is as follows:
disk_ID mount _path partition_size partition_type file_system [Secondary formatting flag]
The default configuration is as follows:
<HDpartitions>
hd0 /boot 512M primary ext4 yes
hd0 /boot/efi 200M primary vfat yes
hd0 / 30G primary ext4
hd0 - - extended -
hd0 /var 1536M logical ext4
hd0 /home max logical ext4
</HDpartitions>
The parameters are described as follows:
disk_ID: ID of a disk. Set this parameter in the format of hdx, where x indicates the xth disk.
NOTE:Partition configuration takes effect only when the disk can be recognized.
mount_path: Mount path to a specified partition. You can configure service partitions and adjust the default system partition. If you do not mount partitions, set this parameter to -.
NOTE:- You must configure the mount path to /. You can adjust mount paths to other partitions according to your needs.
- When the UEFI boot mode is used, the partition configuration in the x86_64 architecture must contain the mount path /boot, and the partition configuration in the AArch64 architecture must contain the mount path /boot/efi.
partition_size: The value types are as follows:
- G/g: The unit of a partition size is GB, for example, 2G.
- M/m: The unit of a partition size is MB, for example, 300M.
- T/t: The unit of a partition size is TB, for example, 1T.
- MAX/max: The rest space of a hard disk is used to create a partition. This value can only be assigned to the last partition.
NOTE:
- A partition size value cannot contain decimal numbers. If there are decimal numbers, change the unit of the value to make the value an integer. For example, 1.5 GB should be changed to 1536 MB.
- When the partition size is set to MAX/max, the size of the remaining partition cannot exceed the limit of the supported file system type (the default file system type is ext4, and the maximum size is 16T).
partition_type: The values of partition types are as follows:
- primary: primary partitions
- extended: extended partition (configure only disk_ID for this partition)
- logical: logical partitions
file_system: Currently, ext4 and vfat file systems are supported.
[Secondary formatting flag]: Indicates whether to format the disk during secondary installation. This parameter is optional.
- The value can be yes or no. The default value is no.
NOTE:Secondary formatting indicates that openEuler has been installed on the disk before this installation. If the partition table configuration (partition size, mount point, and file type) used in the previous installation is the same as that used in the current installation, this flag can be used to configure whether to format the previous partitions, except the /boot and / partitions. If the target host is installed for the first time, this flag does not take effect, and all partitions with specified file systems are formatted.
Configuring the Network
The system network parameters are stored in /opt/imageTailor/custom/cfg_openEuler/sys.conf. You can modify the network parameters of the target ISO image, such as the NIC name, IP address, and subnet mask, by configuring <netconfig-x></netconfig-x> in this file. This operation is not available in the Docker environment.
The default network configuration in the sys.conf file is as follows. netconfig-0 indicates the eth0 NIC. If you need to configure an additional NIC, for example, eth1, add <netconfig-1></netconfig-1> to the configuration file and set the parameters of eth1.
<netconfig-0>
BOOTPROTO="dhcp"
DEVICE="eth0"
IPADDR=""
NETMASK=""
STARTMODE="auto"
</netconfig-0>
The following table describes the parameters.
Parameter Mandatory or Not Value Description BOOTPROTO Yes none / static / dhcp none: No protocol is used for boot, and no IP address is assigned.
static: An IP address is statically assigned.
dhcp: An IP address is dynamically obtained using the dynamic host configuration protocol (DHCP).DEVICE Yes Example: eth1 NIC name. IPADDR Yes Example: 192.168.11.100 IP address.
This parameter must be configured only when the value of BOOTPROTO is static.NETMASK Yes - Subnet mask.
This parameter must be configured only when the value of BOOTPROTO is static.STARTMODE Yes manual / auto / hotplug / ifplugd / nfsroot / off NIC start mode.
manual: A user runs theifupcommand on a terminal to start an NIC.
auto/hotplug/ifplug/nfsroot: An NIC is started when the OS identifies it.
off: An NIC cannot be started in any situations.
For details about the parameters, run theman ifcfgcommand on the host that is used to create the ISO image.
Configuring Kernel Parameters
To ensure stable and efficient running of the system, you can modify kernel command line parameters as required. For an OS image created by imageTailor, you can modify the GRUB_CMDLINE_LINUX configuration in the /opt/imageTailor/custom/cfg_openEuler/usr_file/etc/default/grub file to modify the kernel command line parameters. This operation is not available in the Docker, EMB_rootfs, or QCOW2 environment.
The default settings of the kernel command line parameters in GRUB_CMDLINE_LINUX are as follows:
GRUB_CMDLINE_LINUX="net.ifnames=0 biosdevname=0 crashkernel=512M oops=panic softlockup_panic=1 reserve_kbox_mem=16M crash_kexec_post_notifiers panic=3 console=tty0"
The meanings of the configurations are as follows (for details about other common kernel command line parameters, see related kernel documents):
net.ifnames=0 biosdevname=0
Name the NIC in traditional mode.
crashkernel=512M
The memory space reserved for kdump is 512 MB.
oops=panic panic=3
The kernel panics when an oops error occurs, and the system restarts 3 seconds later.
softlockup_panic=1
The kernel panics when a soft-lockup is detected.
reserve_kbox_mem=16M
The memory space reserved for Kbox is 16 MB.
console=tty0
Specifies tty0 as the output device of the first virtual console.
crash_kexec_post_notifiers
After the system crashes, the function registered with the panic notification chain is called first, and then kdump is executed.
Creating an Image
After customizing the operating system, you can use the mkdliso script to create the OS image file. The OSimage created using imageTailor is an ISO image file.
Command Description
Syntax
mkdliso [-p openEuler|docker|EMB_rootfs|qcow2] [-c custom/cfg_openEuler|custom/cfg_docker|custom/cfg_EMB_rootfs|custom/cfg_qcow2] [--minios yes|no|force] [--sec] [-h]
Parameter Description
| Parameter | Mandatory | Description | Value Range |
|---|---|---|---|
| -p | Yes | Specifies the product name. | openEuler, docker, EMB_rootfs, qcow2 |
| c | Yes | Specifies the relative path of the configuration file. | custom/cfg_openEuler, custom/cfg_docker, custom/cfg_EMB_rootfs, custom/cfg_qcow2 |
| --minios | No | Specifies whether to create the initrd file that is used to boot the system during system installation. | The default value is yes. yes: The initrd file will be created when the command is executed for the first time. When a subsequent mkdliso is executed, the system checks whether the initrd file exists in the usr_install/boot directory using sha256 verification. If the initrd file exists, it is not created again. Otherwise, it is created.no: The initrd file is not created. The initrd file used for system boot and running is the same. force: The initrd file will be created forcibly, regardless of whether it exists in the usr_install/boot directory or not. |
| --sec | No | Specifies whether to perform security hardening on the generated ISO file. If this parameter is not specified, the user should undertake the resultant security risks | N/A |
| -h | No | Obtains help information. | N/A |
Image Creation Guide
To create an ISO image usingmkdliso, perform the following steps:
- The absolute path to
mkdlisomust not contain spaces. Otherwise, the ISO image creation will fail.- In the environment for creating the ISO image, the value of umask must be set to 0022.
Run the
mkdlisocommand as the root user to generate the ISO image file. The following command is used for reference:sudo /opt/imageTailor/mkdliso -p openEuler -c custom/cfg_openEuler --sec sudo /opt/imageTailor/mkdliso -p docker -c custom/cfg_docker sudo /opt/imageTailor/mkdliso -p EMB_rootfs -c custom/cfg_EMB_rootfs sudo /opt/imageTailor/mkdliso -p qcow2 -c custom/cfg_qcow2After the command is executed, the created files are stored in the /opt/imageTailor/result/{date} directory, including:
- openEuler-aarch64.iso and openEuler-aarch64.iso.sha256 in the openEuler environment
- openEuler-image-qemu-*.rootfs.cpio.gz and openEuler-image-qemu-*.rootfs.cpio.gz.sha256 in the EMB_rootfs environment
- docker.*.tar.xz, docker.*.tar.xz.sha256sum, docker_source.rpmlist, and docker_binary.rpmlist in the Docker environment
- openEuler_*.qcow2 and openEuler_*.qcow2.sha256sum in the QCOW2 environment
Verify the integrity of the ISO image file. Assume that the date and time is 2022-03-21-14-48.
cd /opt/imageTailor/result/2022-03-21-14-48/ sha256sum -c openEuler-aarch64.iso.sha256If the following information is displayed, the ISO image creation is complete.
openEuler-aarch64.iso: OKIf the following information is displayed, the image is incomplete. The ISO image file is damaged and needs to be created again.
openEuler-aarch64.iso: FAILED sha256sum: WARNING: 1 computed checksum did NOT matchView the logs.
After an image is created, you can view logs as required (for example, when an error occurs during image creation). When an image is created for the first time, the corresponding log file and security hardening log file are compressed into a TAR package (the log file is named in the format of sys_custom_log_{Date}.tar.gz) and stored in the result/log directory. Only the latest 50 compressed log packages are stored in this directory. If the number of compressed log packages exceeds 50, the earliest files will be overwritten.
Tailoring Time Zones
After the customized ISO image is installed, you can tailor the time zones supported by the openEuler system as required. This section describes how to tailor the time zones.
The information about time zones supported by openEuler is stored in the time zone folder /usr/share/zoneinfo. You can run the following command to view the time zone information:
$ ls /usr/share/zoneinfo/
Africa/ America/ Asia/ Atlantic/ Australia/ Etc/ Europe/
Pacific/ zone.tab
Each subfolder represents an area. The current areas include continents, oceans, and Etc. Each area folder contains the locations that belong to it. Generally, a location is a city or an island.
All time zones are in the format of area/location. For example, if China Standard Time is used in southern China, the time zone is Asia/Shanghai (location may not be the capital). The corresponding time zone file is /usr/share/zoneinfo/Asia/Shanghai.
If you want to tailor some time zones, delete the corresponding time zone files.
Customization Example
This section describes how to use imageTailor to create an ISO image.
Check whether the environment used to create the ISO meets the requirements.
$ cat /etc/openEuler-release openEuler release 22.03 LTSEnsure that the root directory has at least 40 GB free space.
$ df -h Filesystem Size Used Avail Use% Mounted on ...... /dev/vdb 196G 28K 186G 1% /Install the imageTailor tailoring tool. For details, see Installation.
$ sudo yum install -y imageTailor $ ll /opt/imageTailor/ total 88K drwxr-xr-x. 3 root root 4.0K Mar 3 08:00 custom drwxr-xr-x. 10 root root 4.0K Mar 3 08:00 kiwi -r-x------. 1 root root 69K Mar 3 08:00 mkdliso drwxr-xr-x. 2 root root 4.0K Mar 9 14:48 repos drwxr-xr-x. 2 root root 4.0K Mar 9 14:48 security-toolConfigure a local repo source.
$ wget https://repo.openeuler.org/openEuler-22.03-LTS/ISO/aarch64/openEuler-22.03-LTS-everything-aarch64-dvd.iso $ sudo mkdir -p /opt/openEuler_repo $ sudo mount openEuler-22.03-LTS-everything-aarch64-dvd.iso /opt/openEuler_repo mount: /opt/openEuler_repo: WARNING: source write-protected, mounted read-only. $ sudo rm -rf /opt/imageTailor/repos/euler_base && sudo mkdir -p /opt/imageTailor/repos/euler_base $ sudo cp -ar /opt/openEuler_repo/Packages/* /opt/imageTailor/repos/euler_base $ sudo chmod -R 644 /opt/imageTailor/repos/euler_base $ sudo ls /opt/imageTailor/repos/euler_base|wc -l 2577 $ sudo umount /opt/openEuler_repo && sudo rm -rf /opt/openEuler_repo $ cd /opt/imageTailorChange the root and GRUB passwords.
Replace ${pwd*} with the encrypted password by referring to Configuring Initial Passwords.
- openEuler
$ cd /opt/imageTailor/ $ sudo vi custom/cfg_openEuler/usr_file/etc/default/grub GRUB_PASSWORD="${pwd1}" $ $ sudo vi kiwi/minios/cfg_minios/rpm.conf <users group="root"> <user pwd="${pwd2}" home="/root" name="root"/> </users> $ $ sudo vi custom/cfg_openEuler/rpm.conf <users group="root"> <user pwd="${pwd2}" home="/root" name="root"/> </users>Docker: There is no GRUB or root password.
EMB_rootfs:
$ cd /opt/imageTailor/ $ sudo vi custom/cfg_EMB_rootfs/rpm.conf <users group="root"> <user pwd="${pwd2}" home="/root" name="root"/> </users>- qcow2:
$ cd /opt/imageTailor/ $ sudo vi custom/cfg_qcow2/config/root_pwd ${pwd2}Run the tailoring command.
- openEuler
$ sudo rm -rf /opt/imageTailor/result $ sudo ./mkdliso -p openEuler -c custom/cfg_openEuler --minios force ...... Complete release iso file at: result/2022-03-09-15-31/openEuler-aarch64.iso move all mkdliso log file to result/log/sys_custom_log_20220309153231.tar.gz $ ll result/2022-03-09-15-31/ total 889M -rw-r--r--. 1 root root 889M Mar 9 15:32 openEuler-aarch64.iso -rw-r--r--. 1 root root 87 Mar 9 15:32 openEuler-aarch64.iso.sha256- Docker:
$ sudo rm -rf /opt/imageTailor/result $ sudo ./mkdliso -p docker -c custom/cfg_docker ...... Complete release iso file at: result/2023-03-09-15-31/docker.aarch64.tar.xz move all mkdliso log file to result/log/sys_custom_log_20230309153231.tar.gz $ ls result/2023-03-09-15-31/ docker.aarch64.tar.xz docker_binary.rpmlist docker_source.rpmlist docker.aarch64.tar.xz.sha256sum- EMB_rootfs:
$ sudo rm -rf /opt/imageTailor/result $ sudo ./mkdliso -p EMB_rootfs -c custom/cfg_EMB_rootfs ...... Complete release iso file at: result/2023-02-20-18-13/openEuler-image-qemu-aarch64-20230220181343.rootfs.cpio.gz move all mkdliso log file to result/log/sys_custom_log_20230220181343.tar.gz $ ls result/2023-02-20-18-13/ openEuler-image-qemu-aarch64-20230220181343.rootfs.cpio.gz openEuler-image-qemu-aarch64-20230220181343.rootfs.cpio.gz.sha256- QCOW2:
$ sudo rm -rf /opt/imageTailor/result $ sudo ./mkdliso -p qcow2 -c custom/cfg_qcow2 ...... create qcow2 success $ ls result/2023-05-23-15-29/ openEuler_aarch64.qcow2 openEuler_aarch64.qcow2.sha256sum





