
Feature Introduction
Absolute Preemption
Rubik allows you to configure priorities of services. In the hybrid deployment of online and offline services, Rubik ensures that online services preempt resources. CPU and memory resources can be preempted.
You can enable preemption using the following configuration:
...
"agent": {
"enabledFeatures": [
"preemption"
]
},
"preemption": {
"resource": [
"cpu",
"memory"
]
}
...
For details, see Configuration Description.
In addition, you need to add volcano.sh/preemptable to the YAML annotation of the pod to specify service priorities. For example:
annotations:
volcano.sh/preemptable: true
This annotation is used by all Rubik features to identify whether the service is online or offline. true indicates an online service. false indicates an offline service.
CPU Absolute Preemption
Prerequisites
- The kernel supports CPU priority configuration based on control groups (cgroups). The CPU subsystem provides the cpu.qos_level interface. The kernel of openEuler 22.03 or later is recommended.
Kernel interface
- The interface exists in the cgroup of the container in the /sys/fs/cgroup/cpu directory, for example, /sys/fs/cgroup/cpu/kubepods/burstable/
/ .- cpu.qos_level: enables the CPU priority configuration. The value can be 0 or -1, with 0 being the default.
- 0 indicates an online service.
- 1 indicates an offline service.
- cpu.qos_level: enables the CPU priority configuration. The value can be 0 or -1, with 0 being the default.
Memory Absolute Preemption
In the hybrid deployment of online and offline services, Rubik ensures that offline services are first terminated in the case of out-of-memory (OOM).
Prerequisites
- The kernel supports memory priority configuration based on cgroups. The memory subsystem provides the memory.qos_level interface. The kernel of openEuler 22.03 or later is recommended.
- To enable the memory priority feature, run
echo 1 > /proc/sys/vm/memcg_qos_enable.
Kernel interface
/proc/sys/vm/memcg_qos_enable: enables the memory priority feature. The value can be 0 or 1, with 0 being the default. You can run
echo 1 > /proc/sys/vm/memcg_qos_enableto enable the feature.- 0: The feature is disabled.
- 1: The feature is enabled.
The interface exists in the cgroup of the container in the /sys/fs/cgroup/memory directory, for example, /sys/fs/cgroup/memory/kubepods/burstable/
/ .- memory.qos_level: enables the memory priority configuration. The value can be 0 or -1, with 0 being the default.
- 0 indicates an online service.
- 1 indicates an offline service.
- memory.qos_level: enables the memory priority configuration. The value can be 0 or -1, with 0 being the default.
dynCache Memory Bandwidth and L3 Cache Access Limit
Rubik can limit pod memory bandwidth and L3 cache access for offline services to reduce the impact on online services.
Prerequisites
The cache access and memory bandwidth limit feature supports only physical machines.
- For x86 physical machines, the CAT and MBA functions of Intel RDT must be enabled in the OS by adding rdt=l3cat,mba to the kernel command line parameters (cmdline).
- For ARM physical machines, the MPAM function must be enabled in the OS by adding mpam=acpi to the kernel command line parameters (cmdline).
Due to kernel restrictions, RDT does not support the pseudo-locksetup mode.
New Permissions and Directories of Rubik
- Mount point: /sys/fs/resctrl. Rubik reads and sets files in the /sys/fs/resctrl directory. This directory must be mounted before Rubik is started and cannot be unmounted during Rubik running.
- Permission: SYS_ADMIN. To set files in the /sys/fs/resctrl directory on the host, the SYS_ADMIN permission must be assigned to the Rubik container.
- namepsace: pid namespace. Rubik obtains the PID of the service container process on the host. Therefore, the Rubik container needs to share the PID namespace with the host.
Rubik RDT Cgroups
Rubik creates five cgroups (rubik_max, rubik_high, rubik_middle, rubik_low and rubik_dynamic) in the RDT resctrl directory (/sys/fs/resctrl by default). Rubik writes the watermarks to the schemata file of each corresponding cgroup upon startup. The low, middle, and high watermarks can be configured in dynCache. The max cgroup uses the default maximum value. The initial watermark of the dynamic cgroup is the same as that of the low cgroup.
Rubik dynamic Cgroup
When offline pods whose cache level is dynamic exist, Rubik collects the cache miss and LLC miss metrics of online service pods on the current node and adjusts the watermark of the rubik_dynamic cgroup. In this way, Rubik dynamically controls offline service pods in the dynamic cgroup.
Memory Bandwidth and LLC Limit of the Pod
Rubik allows you to configure the memory bandwidth and LLC cgroup for a service pod in either of the following ways:
Global annotation You can set defaultLimitMode in the global parameters of Rubik. Rubik automatically configures cgroups for offline service pods (marked by the volcano.sh/preemptable annotation in the absolute preemption configuration).
- If the value is static, the pod is added to the rubik_max cgroup.
- If the value is dynamic, the pod is added to the rubik_dynamic cgroup.
Manual annotation
- You can set the cache level for a service pod using the volcano.sh/cache-limit annotation and the pod to the specified cgroup. For example, the pod with the following configuration is added to the rubik_low cgroup:
annotations: volcano.sh/cache-limit: "low"
Note 1: Cache limits apply to offline services only. Note 2: The manual annotation overrides the global one. If you set defaultLimitMode in the global Rubik configuration and specify the cache level in the YAML configuration of a pod, the actual dynCache limit is the one specified in the pod YAML configuration.
dynCache Kernel Interface
- Rubik creates five cgroup directories in /sys/fs/resctrl and modifies the schemata and tasks files of each cgroup.
dynCache Configuration
The dynCache function is configured as follows:
"agent": {
"enabledFeatures": [
"dynCache"
]
},
"dynCache": {
"defaultLimitMode": "static",
"adjustInterval": 1000,
"perfDuration": 1000,
"l3Percent": {
"low": 20,
"mid": 30,
"high": 50
},
"memBandPercent": {
"low": 10,
"mid": 30,
"high": 50
}
}
For details, see Configuration Description
l3Percent and memBandPercent: l3Percent and memBandPercent are used to configure the watermarks of the low, mid, and high cgroups.
Assume that in the current environment rdt bitmask=fffff and numa=2. Based on the low value of l3Percent (20) and the low value of memBandPercent (10), Rubik configures /sys/fs/resctrl/rubik_low as follows:
L3:0=f;1=f MB:0=10;1=10defaultLimitMode:
- If the volcano.sh/cache-limit annotation is not specified for an offline pod, the defaultLimitMode of cacheConfig determines the cgroup to which the pod is added.
adjustInterval:
- Interval for dynCache to dynamically adjust the rubik_dynamic cgroup, in milliseconds. The default value is 1000.
perfDuration:
- perf execution duration for dynCache, in milliseconds. The default value is 1000.
Precautions for dynCache
- dynCache takes affect only for offline pods.
- If a service container is manually restarted during running (the container ID remains unchanged but the container process ID changes), dynCache does not take effect for the container.
- After a service container is started and the dynCache level is set, the limit level cannot be changed.
- The sensitivity of adjusting the dynamic cgroup is affected adjustInterval and perfDuration values in the Rubik configuration file and the number of online service pods on the node. If the impact detection result indicates that adjustment is required, the adjustment interval fluctuates within the range [adjustInterval + perfDuration, adjustInterval + perfDuration x Number of pods]. You can set the configuration items based on your required sensitivity.
dynMemory Tiered Memory Reclamation
Rubik supports multiple memory strategies. You can apply different memory allocation methods to different scenarios.
fssr
fssr is kernel cgroup-based dynamic watermark control. memory.high is a memcg-level watermark interface provided by the kernel. Rubik continuously detects memory usage and dynamically adjusts the memory.high limit of offline services to suppress the memory usage of offline services, ensuring the quality of online services.
The core logic of fssr is as follows:
- Rubik calculates the memory to reserve upon startup. The default value is the smaller of 10% of total memory or 10 GB.
- Rubik sets the cgroup-level watermark of the offline container. The kernel provides the memory.high and memory.high_async_ratio interfaces for configuring the soft upper limit and alarm watermark of the cgroup. By default, memory.high is 80% of the total memory (total_memory).
- Rubik obtains the free memory (free_memory).
- When free_memory is less than reserved_memory, Rubik decreases memory.high for the offline container. The amount decreased each time is 10% of total_memory.
- If free_memory is more than double the amount of reserved_memory, Rubik increases memory.high. The amount increased each time is 1% of total_memory.
Kernel interface
- The interface exists in the cgroup of the container in the /sys/fs/cgroup/memory directory, for example, /sys/fs/cgroup/memory/kubepods/burstable/
/ . When the fssr strategy is used, Rubik adjusts the following value of offline service containers based on the memory usage of the current node: - memory.high
dynMemory Configuration
The strategy and check interval of the dynMemory module can be specified in dynMemory:
"dynMemory": {
"policy": "fssr"
}
- policy indicates the dynMemory policy, which supports fssr.
Flexible Bandwidth
To effectively solve the problem of QoS deterioration caused by the CPU bandwidth limit of a service, the Rubik provides flexible bandwidth to allow the container to use extra CPU resources, ensuring stable service running. The flexible bandwidth solution is implemented in both kernel mode and user mode. They cannot be used at the same time.
The user-mode solution is implemented through the CFS bandwidth control capability provided by the Linux kernel. On the premise that the load watermark of the entire system is secure and stable and does not affect the running of other services, the dual-watermark mechanism allows service containers to adaptively adjust the CPU bandwidth limit, relieving CPU resource bottlenecks and improving service performance.
The kernel-mode solution is implemented through the CPU burst capability provided by the Linux kernel, which allows containers to temporarily exceed its CPU usage limit. You need to manually configure the kernel-mode configuration by setting the burst value for each pod. Rubik does not automatically sets the values.
quotaTurbo User-Mode Solution
You need manually set the volcano.sh/quota-turbo="true" annotation for the service pod that requires flexible CPU bandwidth. This annotation takes effect only for the pod whose CPU quota is limited, that is, CPULimit is specified in the YAML file. The user-mode flexible bandwidth policy periodically adjusts the CPU quota of an allowlist container based on the CPU load of the entire system and container running status, and automatically checks and restores the quota values of all containers when Rubik is started or stopped. (The CPU quota described in this section refers to the cpu.cfs_quota_us parameter of the container.) The adjustment policies are as follows:
- When the CPU load of the entire system is lower than the alarm threshold, if the allowlist container is suppressed by the CPU in the current period, Rubik slowly increases the CPU quota of the container based on the suppression status. The total container quota increase in a single period cannot exceed 1% of the total CPU quota of the current node.
- When the CPU load of the entire system is higher than the high watermark, if the allowlist container is not suppressed by the CPU in the current period, Rubik slowly increases the container quota based on the watermark.
- When the CPU load of the entire system is higher than the alarm threshold, if the current quota value of the allowlist container exceeds the configured value, Rubik quickly decreases the CPU quotas of all containers to ensure that the load is lower than the alarm watermark.
- The maximum CPU quota that a container can have cannot exceed twice the configured value (for example, the CPULimit parameter specified in the pod YAML file), and cannot be less than the configured value.
- The overall CPU usage of the container within 60 synchronization periods cannot exceed the configured value.
- If the overall CPU usage of a node exceeds 10% within 1 minute, the container quota will not be increased in this period.
Kernel interface
The interface exists in the cgroup of the container in the /sys/fs/cgroup/cpu directory, for example, /sys/fs/cgroup/cpu,cpuacct/kubepods/burstable/
- cpu.cfs_quota_us
- cpu.cfs_period_us
- cpu.stat
quotaTurbo Configuration
The quotaTurbo function is configured as follows:
"agent": {
"enabledFeatures": [
"quotaTurbo"
]
},
"quotaTurbo": {
"highWaterMark": 60,
"alarmWaterMark": 80,
"syncInterval": 100
}
For details, see Configuration Description.
- highWaterMark is the high watermark of CPU load.
- alarmWaterMark is the alarm watermark of CPU load.
- syncInterval is the interval for triggering container quota updates, in milliseconds.
You need to manually specify the volcano.sh/quota-turbo="true" annotation for the service pod.
metadata:
annotations:
# true means to add the pod to the allowlist of quotaTurbo
volcano.sh/quota-turbo : "true"
quotaBurst Kernel-Mode Solution
quotaBurst can be enabled through the cpu.cfs_burst_us kernel interface. Rubik allows a container to accumulate CPU resources when the CPU usage of the container is lower than the quota and uses the accumulated CPU resources when the CPU usage exceeds the quota.
Kernel interface
The interface exists in the cgroup of the container in the /sys/fs/cgroup/cpu directory, for example, /sys/fs/cgroup/cpu/kubepods/burstable/
- cpu.cfs_burst_us
The kernel-mode solution is implemented through the cpu.cfs_burst_us interface. The cpu.cfs_burst_us file must exist in the CPU subsystem directory of the cgroup. The value of cpu.cfs_burst_us can be as follows:
- When cpu.cfs_quota_us is not -1, the sum of cfs_burst_us and cfs_quota_us must not be greater than $2^{44}$-1, and cfs_burst_us is less than or equal to cfs_quota_us.
- When cpu.cfs_quota_us is -1, the CPU burst function is not enabled, and cfs_burst_us is 0.
quotaBurst Configuration
The quotaBurst function is configured as follows:
"agent": {
"enabledFeatures": [
"quotaBurst"
]
}
You need to manually specify the volcano.sh/quota-burst-time annotation for the service pod or run kubectl annotate to dynamically add the annotation.
In the YAML file upon pod creation:
metadata: annotations: # The default unit is microsecond. volcano.sh/quota-burst-time : "2000"Modify annotation: You can run the kubectl annotate command to dynamically modify annotation. For example:
kubectl annotate --overwrite pods <podname> volcano.sh/quota-burst-time='3000'
Constraints
- The user-mode CPU bandwidth control is implemented through the cpu.cfs_period_us (CFS bandwidth control) and cpu.cfs_quota_us parameters. The following restrictions apply:
- To avoid unknown errors, other users are not allowed to modify CFS bandwidth control parameters (including but not limited to cpu.cfs_quota_us and cpu.cfs_period_us).
- Do not use this function together with similar programs that limit CPU resources. Otherwise, the user-mode function cannot be used properly. Similar programs include but are not limited to Kubernetes VPA and HPA, Tencent EVPA, Alibaba CPU Burst, and CPU-share and core binding provided by cgroup.
- If you monitor the metrics related to CFS bandwidth control, using this feature may affect the consistency of the monitored metrics.
- The following restrictions apply to the kernel-mode solution:
- Use the Kubernetes interface to set the burst value of the pod. Do not manually modify the cpu.cfs_burst_us file in the CPU cgroup directory of the container.
- Do not enable both kernel-mode and user-mode flexible bandwidth solutions at the same time.
I/O Weight Control Based on ioCost
To solve the problem that the QoS of online services deteriorates due to high I/O usage of offline services, Rubik provides the I/O weight control function based on ioCost of cgroup v1. For more, see the ioCost description.
Prerequisites
Rubik can control the I/O weight distribution of different pods through iocost of cgroup v1. Therefore, the kernel must support the following features:
- cgroup v1 blkcg iocost
- cgroup v1 writeback
The blkio.cost.qos and blkio.cost.model file interfaces exist in the blkcg root system file. For details about the implementation and interface description, see the openEuler kernel document.
ioCost Implementation Description
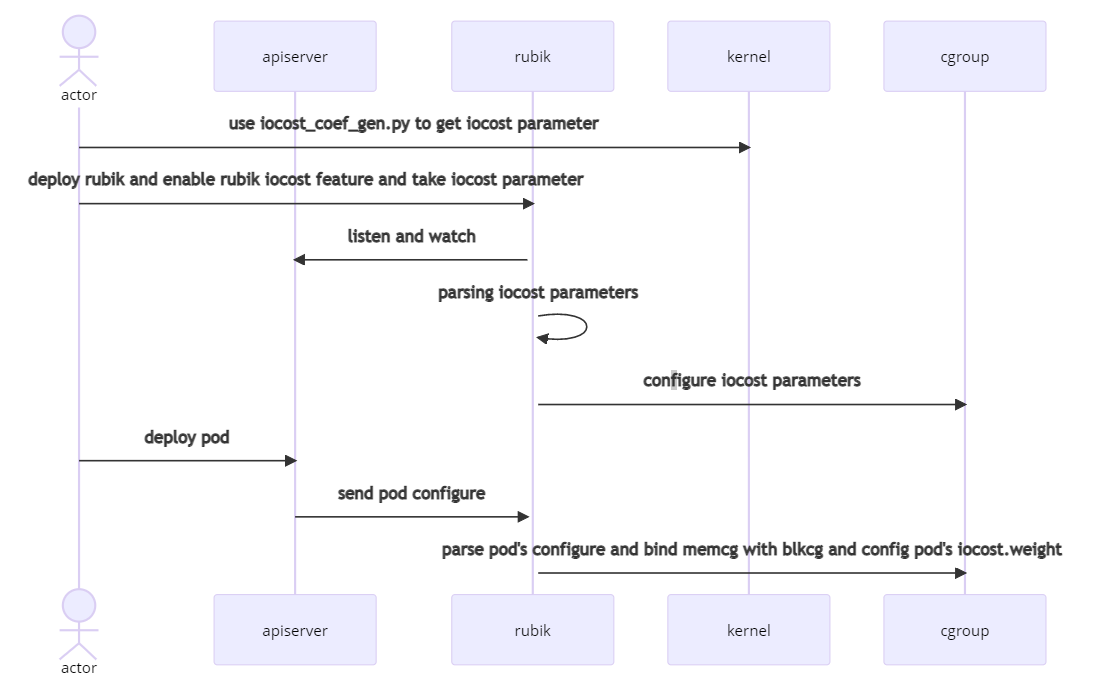
The procedure of the Rubik implementation is as follows:
- When Rubik is deployed, Rubik parses the configuration and sets iocost parameters.
- Rubik registers the detection event to the Kubernetes API server.
- When a pod is deployed, the pod configuration information is write back to Rubik.
- Rubik parses the pod configuration information and configures the pod iocost weight based on the QoS level.
ioCost Configuration
"agent": {
"enabledFeatures": [
"ioCost"
]
}
"ioCost": [{
"nodeName": "k8s-single",
"config": [
{
"dev": "sdb",
"enable": true,
"model": "linear",
"param": {
"rbps": 10000000,
"rseqiops": 10000000,
"rrandiops": 10000000,
"wbps": 10000000,
"wseqiops": 10000000,
"wrandiops": 10000000
}
}
]
}]
For details, see Configuration Description.
Note: Parameters related to the ioCost linear model can be obtained through iocost_coef_gen.py.
Interference Detection Based on Pressure Stall Information Metrics
Rubik can observe the pressure stall information (PSI) metrics of online pods to determine the pressure, evicts offline pods, and generates log alarms. Rubik uses some avg10 as the indicator, which indicates the average blocking time proportion of any task within 10s. You can choose to monitor the CPU, memory, and I/O resources as required and set thresholds. If the blocking time proportion exceeds the threshold, Rubik evicts offline pods based on certain policies to release corresponding resources. If the CPU and memory usage of an online pod is high, Rubik evicts the offline service that occupies the most CPU or memory resources. If the I/O of offline services is high, Rubik evicts the offline service that occupies the most CPU resources.
The offline service is identified by the annotation volcano.sh/preemptable="true"/"false".
annotations:
volcano.sh/preemptable: true
Prerequisites
Rubik depends on the PSI feature of cgroup v1. openEuler 22.03 LTS and later versions support the PSI interface of cgroup v1. You can run the following command to check whether the PSI interface is enabled in the kernel:
cat /proc/cmdline | grep "psi=1 psi_v1=1"
If no results are returned, add the boot parameter to the kernel cmdline:
# View the kernel version.
uname -a
# View the boot file of the kernel.
ls /boot/linux openEuler 5.10.0-153.12.0.92.oe2203sp2.x86_64
grubby --update-kernel="/boot/linux openEuler 5.10.0-153.12.0.92.oe2203sp2.x86_64" --args="psi=1 psi_v1=1"
# Reboot.
reboot
Kernel interface
The interface exists in the cgroup of the container in the /sys/fs/cgroup/cpuacct directory, for example, /sys/fs/cgroup/cpu,cpuacct/kubepods/burstable/
- cpu.pressure
- memory.pressure
- io.pressure
psi Configuration
"agent": {
"enabledFeatures": [
"psi"
]
}
"psi": {
"interval": 10,
"resource": [
"cpu",
"memory",
"io"
],
"avg10Threshold": 5.0
}
For details, see Configuration Description.





