
UniProton接口说明
任务
创建并激活任务
在OS启动之前(比如在uniAppInit)中创建的任务,只是简单地加入就绪队列。 OS启动后创建的任务,如果优先级高于当前任务且未锁任务,则立即发生任务调度并被运行,否则加入就绪队列,等待执行。
输入: 任务创建参数,包括任务名、任务栈大小、任务优先级、任务处理函数等。
处理:
- 申请任务栈空间,初始化任务栈,置栈顶魔术字。
- 初始化任务上下文。
- 初始化任务控制块。
- 激活任务,任务是否马上能得到执行,取决于OS是否已经启动、优先级是否高于当前任务且没有锁任务调度、当前线程是否为硬中断。
输出 :
成功:任务ID,若任务具备执行条件,则直接运行任务,否则将任务挂入就绪队列。
失败:提示错误码。
删除任务
删除任务并释放任务资源。
输入:任务ID。
处理:
- 检查任务是否具备删除条件,如锁任务调度情况下不允许删除任务。
- 如果任务处于阻塞状态,从对应的阻塞队列中摘除。
- 释放任务控制块。
- 释放任务栈空间。
- 从就绪队列中载入最高优先级的任务,若具备调度条件,则执行。
输出:
成功:若具备调度条件,则执行就绪队列中的最高任务;
失败:返回错误码。
挂起任务
挂起任务。
输入:任务ID。
处理:将指定任务从就绪队列中摘除,若指定任务处于Running态,则会触发任务切换。
输出:
成功:挂起指定任务。
失败:返回错误码。
恢复任务
恢复挂起的任务。
输入:任务ID。
处理:恢复挂起的任务,若任务仍处于延时、阻塞态,则只是取消挂起态,并不加入就绪队列。
输出:
- 成功:取消任务挂起状态。
- 失败:返回错误码。
任务延时
将当前任务延时指定时间。
输入:延时时间。
处理:
- 延时时间转换成OS的Tick数。
- 将当前任务从就绪队列中摘除,置成延时态。
- 从就绪队列中载入最高优先级的任务,并执行。
- Tick中断处理函数中判断任务的延时时间是否已经足够,如果足够,将任务加入就绪队列。
输出:
- 成功:当前任务切出,就绪队列中的最高优先级任务切入。
- 失败:返回错误码。
锁任务调度
禁止任务之间的切换。
输入:锁任务调度请求。
处理:
- 若有任务切换请求,将其清除。
- 锁任务调度次数++。
输出: 任务之间无法切换。
恢复任务调度的锁/解锁状态
与锁任务调度配对使用,是否解锁任务调度,取决于最近一次锁任务调度前,是否允许任务调度。
输入:恢复任务调度的锁/解锁状态请求。
处理:
- 锁任务调度次数--。
- 若锁任务调度次数等于0,则发起任务调度。
输出:若最近一次锁任务调度前,允许任务调度,则从就绪队列中载入最高优先级任务,并执行。否则,维持原状,不能发生任务切换。
任务PID合法性检查
检查指定任务PID是否合法。
输入:任务PID。
处理:判断输入的任务PID是否超过最大任务PID号或是否已创建。
输出:
- TRUE :任务PID有效。
- FALSE:任务PID无效。
任务私有数据获取
获取当前任务的私有数据。
输入:无。
处理:将任务TCB中记录的任务私有数据返回。
输出:任务私有数据。
查询本核指定任务正在PEND的信号量
查询指定任务正在PEND的信号量ID。
输入:任务PID。
处理: 根据任务状态和任务控制块,判断任务是否PEND在信号量,以及PEND的信号量ID。
输出:
- 成功:返回信号量ID。
- 失败:返回错误码。
查询任务状态
获取指定任务的状态。
输入:任务PID。
处理:将指定任务的TCB中记录的任务状态字段返回。
输出:
- 成功:返回任务状态信息。
- 失败:返回错误码。
查询任务上下文信息
获取指定任务的上下文信息。
输入:任务PID。
处理: 将指定任务的TCB中记录的任务上下文信息返回。
输出:
- 成功:返回任务上下文信息。
- 失败:返回错误码。
查询任务基本信息
获取任务基本信息,包括任务切换时的PC,SP、任务状态、优先级、任务栈大小、栈顶值,任务名等。
输入:任务PID,用于存放任务基本信息查询结果的缓冲区
处理: 将指定任务的TCB中记录的任务基本信息返回。
输出:
- 成功:返回任务基本信息。
- 失败:返回错误码。
任务优先级获取
获取指定任务的优先级。
输入:任务PID
处理:将指定任务的TCB中记录的优先级字段返回。
输出:
- 成功:返回任务优先级信息。
- 失败:返回错误码。
任务优先级设定
设置指定任务的优先级。
输入:任务PID、优先级值
处理:将输入的任务优先级信息存入指定任务TCB中优先级字段
输出:
- 成功:指定任务的优先级被修改。
- 失败:返回错误码。
调整指定优先级的任务调度顺序
设置指定任务的优先级。
输入:指定的优先级、指定需要调整调度顺序的任务,用于保存被调整到队首的任务ID的缓冲。
处理:若指定要调整调度顺序的任务为TASK_NULL_ID,则优先级队列中的第一个就绪任务调整至队尾;否则,将指定要调整调度顺序的任务调整至优先级队列的队首。
输出:
- 成功:指定优先级的任务调度顺序被修改。
- 失败:返回错误码。
事件
写事件
写事件操作实现对指定任务写入指定类型的事件,可以一次同时写多个事件。
输入:任务ID、事件号。
处理:
- 对指定任务事件类型写上输入事件。
- 判断目的任务是否正在接收等待事件,且其等待的事件是否已经符合唤醒条件(唤醒条件即读取的事件已经发生)。
- 如果符合唤醒条件,则需清除任务读事件状态。
- 如果符合唤醒条件,则需清除任务读事件状态。
- 清除任务超时状态。
- 在任务没有被挂起的情况下,需要将任务加入就绪队列并尝试任务调度。
输出:
- 成功:事件写入成功。
- 失败:错误码。
读事件
读事件操作可以根据入参事件掩码类型读取单个或者多个事件。
输入:要读取的事件掩码、读取事件所采取的策略、超时时间、接收事件的指针。
处理:
- 根据入参事件掩码类型对自身任务输入读取事件类型。
- 判断事件读取模式,是读取输入的所有事件还是其中的任意一种事件。
- 根据读取模式,判断期望的事件是否满足读取情况。
- 判断事件等待模式:如果为等待事件模式则根据模式来设置相应的超时时间;如果为非等待模式则事件读取失败。
- 如果需要等待阻塞读取,则需要将自己的任务从就绪列表中删除,并进行任务调度。
- 读取成功后,清除读取的事件类型,并且把事件类型返回。
输出:
- 成功:读事件成功,事件指针赋值。
- 失败:错误码
队列
创建队列
创建一个队列,创建时可以设定队列长度和队列结点大小。
输入: 队列节点个数、每个队列节点大小、队列ID指针。
处理:
- 申请一个空闲的队列资源。
- 申请队列所需内存。
- 初始化队列配置。
输出:
- 成功:队列ID。
- 失败:错误码。
读队列
读指定队列的数据。
输入:队列ID、缓冲区指针、长度指针、超时时间。
处理:
- 获取指定队列控制块。
- 读队列PEND标志,根据缓冲区大小填入队列数据。
- 修改队列头指针。
输出:
- 成功:缓冲区内填入队列数据。
- 失败:错误码。
写队列
写数据到指定队列。
输入: 队列ID、缓冲区指针、缓冲区长度、超时时间、优先级。
处理:
- 获取指定队列控制块。
- 读队列PEND标志,选取消息节点,初始化消息节点并拷贝数据。
- 队列读资源计数器加一。
输出:
- 成功:写入队列数据成功。
- 失败:错误码。
删除队列
删除一个消息队列,删除后队列资源被回收。
输入:队列ID。
处理:
- 获取指定队列控制块,确保队列未在使用中。
- 释放队列内存。
输出:
- 成功:删除队列成功。
- 失败:错误码
查询队列的历史最大使用长度
获取从队列创建到删除前的历史最大使用长度。
输入:队列ID、队列节点使用峰值指针。
处理:
- 获取指定队列控制块。
- 将队列节点使用峰值赋值到指针参数。
输出:
- 成功:获取峰值成功。
- 失败:错误码
查询指定源PID的待处理消息个数
从指定队列中,获取指定源PID的待处理消息个数。
输入:队列ID、线程PID、待处理的消息个数指针。
处理:
- 获取指定队列控制块。
- 遍历队列查询待处理的消息个数,赋值到指针变量。
输出:
- 成功:获取待处理的消息个数成功。
- 失败:错误码。
中断
创建硬中断
硬中断在使用前,必须先创建。
输入:硬中断的创建参数,如:硬中断号(与芯片相关)、硬中断优先级、硬中断处理函数等。
处理:根据硬中断号设置硬中断优先级、处理函数。
输出:
- 成功:硬中断触发后,CPU能够响应该硬中断,并回调硬中断处理函数。
- 失败:返回错误码。
硬中断属性设置
在创建硬中断前,需要设置硬中断的模式,包括独立型(#OS_HWI_MODE_ENGROSS)和组合型(#OS_HWI_MODE_COMBINE)两种配置模式。
输入:硬中断号、硬中断模式。
处理:根据硬中断号设置硬中断的模式;
输出:
- 成功:指定的硬中断号被设置好硬中断模式。
- 失败:返回错误码。
删除硬中断
屏蔽相应硬中断或事件,取消硬中断处理函数的注册。
输入:硬中断号。
处理:取消指定硬中断的处理函数与中断号的绑定关系。
输出:硬中断被删除,当硬中断信号触发后,CPU不会响应该中断。
使能硬中断
使能指定的硬中断。
输入:硬中断号。
处理:将指定硬中断的使能位置位。
输出:指定的硬中断被使能,当硬中断信号触发后,CPU会响应该中断。
屏蔽硬中断
屏蔽指定的硬中断。
输入:硬中断号。
处理:清除指定硬中断的使能位。
输出:指定的硬中断被屏蔽,当硬中断信号触发后,CPU不会响应该中断。
恢复指定硬中断
恢复指定的硬中断。
输入:硬中断号、中断使能寄存器的保存值。
处理:还原指定硬中断的使能位。
输出:指定中断的使能位恢复为指定状态。
禁止硬中断
禁止响应所有可屏蔽硬中断。
输入:禁止硬中断请求。
处理:
- 记录系统状态,用于后续返回。
- 禁止响应所有可屏蔽硬中断。
输出:
- 所有可屏蔽硬中断都不能响应。
- 禁止硬中断响应前的系统状态。
恢复硬中断
恢复硬中断的禁止/允许响应状态,与禁止硬中断配对使用。是否允许响应硬中断,取决于最近一次禁止硬中断前,系统是否允许响应硬中断。
输入:最近一次禁止硬中断前的系统状态。
处理:将系统状态恢复到最近一次禁止硬中断前。
输出:系统状态恢复到最近一次禁止硬中断前。
响应硬中断
硬中断触发后,CPU会响应硬中断。
输入:硬件触发的硬中断信号,且系统没有禁止硬中断。
处理:
- 保存当前上下文。
- 调用硬中断处理函数。
- 若任务被打断,则恢复最高优先级任务的上下文,该任务不一定是被中断打断的任务。
- 若低优先级中断被打断,则直接恢复低先级中断的上下文。
输出:硬中断被响应。
触发硬中断
触发指定核号的指定硬中断。
输入:核号、硬中断号。
处理:
- 目前只支持触发本核的硬中断,若指定的核号不为本核,则做报错处理。
- 目前只支持触发软件可触发的硬中断,若指定的中断无法进行软件触发,则做报错处理。
- 当以前两个条件都满足,则设置对应的中断触发寄存器,软件触发中断。
输出:
- 成功:响应的硬中断被触发。
- 失败:返回错误码。
清除中断位
清除所有的中断请求位或指定的中断请求位。
输入:硬中断号。
处理:清除所有的中断请求位或指定的中断请求位。
输出:所有的中断请求位或指定的中断请求位被清除
定时器
定时器创建
根据定时器类型,触发模式,定时时长,处理函数等创建一个定时器。
输入:
- 创建参数结构体(包括定时器类型,触发模式,定时时长,处理函数等)。
- 用于保存输出的定时器句柄的指针。
处理:根据入参找到空闲控制块,将入参内容填入控制块中相应的字段中。
输出:
- 成功:定时器创建成功,后续可根据得到的定时器句柄做启动、删除等操作。
- 失败:返回错误码。
定时器删除
删除指定的定时器。
输入: 定时器句柄
处理:根据传入的定时器句柄,找到定时器控制块,将其内容清空并将控制块挂接到相应的空闲链表中。
输出:
- 成功:定时器被删除。
- 失败:返回错误码。
定时器启动
指定的定时器开始计时。
输入: 定时器句柄
处理:对于软件定时器,根据当前Tick计数以及定时器周期,计算结束时间,将此定时器控制块挂入定时器SortLink。
输出:
- 成功:定时器开始计时。
- 失败:返回错误码。
定时器停止
指定的定时器停止计时。
输入:定时器句柄。
处理:对于软件定时器,计算剩余时间并将其保存后,将此定时器控制块从定时器SortLink中摘除。
输出:
- 成功:指定任务的信号量计数值被修改。
- 失败:返回错误码。
定时器重启
指定的定时器重新开始计时。
输入:定时器句柄
处理:对于软件定时器,根据当前Tick计数以及定时器周期,计算结束时间,将此定时器控制块挂入定时器SortLink。
输出:
- 成功:指定任务的信号量计数值被修改。
- 失败:返回错误码。
软件定时器组创建
创建一个软件定时器组,后续的软件定时器创建时需要以此为基础。
输入:
- 软件定时器组创建参数(主要关注时钟源类型及最大支持的定时器个数)。
- 用于保存输出的定时器组号的地址。
处理:根据传入的最大支持的定时器个数申请定时器控制块内存,并完成其初始化操作。
输出:
- 成功:基于Tick的软件定时器组被成功创建。
- 失败:返回错误码。
信号量
信号量创建
创建一个信号量,并设置其初始计数器数值。
输入:信号量初始计数值、用于保存创建得到句柄的地址。
处理:找到一个空闲信号量控制块,将输入的初始计数值填入后将信号量ID当做句柄返回。
输出:
- 成功:信号量被创建。
- 失败:返回错误码。
信号量删除
删除指定信号量,若有任务阻塞于该信号量,则删除失败。
输入:信号量句柄
处理:对于核内信号量,根据输入的信号量句柄找到信号量控制块,通过查看控制块中任务阻塞链表是否为空来判断是否有任务阻塞于该信号量,若有则删除失败返回,否则释放该信号量控制块。
输出:
- 成功:信号量被删除。
- 失败:返回错误码。
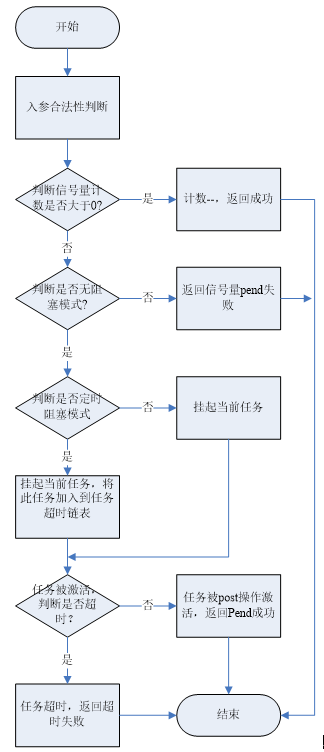
Pend信号量
申请指定的信号量,若其计数值大于0,则直接将计数值减1返回,否则发生任务阻塞,等待时间可通过入参设定。
输入:信号量句柄、等待时间
处理:
输出:
- 成功:返回0。
- 失败:返回错误码。
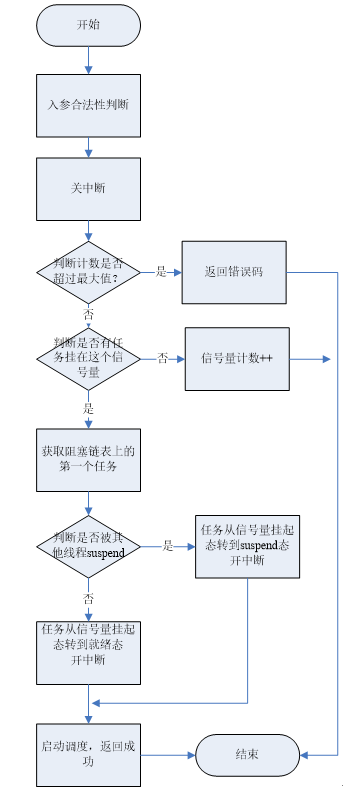
Post信号量
发布信号量,将该信号量计数值+1,若有任务阻塞于该信号量,则将其唤醒。
输入:信号量句柄。
处理:
输出:
- 成功:信号量发布成功。
- 失败:返回错误码。
信号量计数值重置
设置指定信号量计数值,如果有任务阻塞于该信号量,则设置失败。
输入:信号量句柄、信号量计数值。
处理:根据输入的信号量句柄,找到相应的信号量控制块,查看控制块中任务阻塞链表,若其不为空,则返回错误,否则将控制块中信号量计数值设为输入的计数值。
输出:
- 成功:指定信号量的计数值被修改;
- 失败:返回错误码。
信号量计数值获取
获取指定信号量计数值。
输入: 信号量句柄
处理:根据输入的信号量句柄,找到相应的信号量控制块,将控制块中记录的信号量计数值返回。
输出:
- 成功:返回信号量计数值。
- 失败:返回错误计数值标记。
信号量阻塞任务PID获取
获取阻塞在指定信号量上的任务个数及任务PID列表。
输入:
- 信号量句柄。
- 用于存放输出的阻塞任务个数的地址。
- 用于存放输出的阻塞任务PID的缓冲区首地址。
- 用于存放输出的阻塞任务PID的缓冲区长度。
处理:若有任务阻塞于指定信号量,则输出阻塞任务的个数及任务PID清单;否则,将阻塞任务个数置为0。
输出:
- 成功:输出阻塞于该信号量的任务个数及任务PID清单。
- 失败:返回错误码。
异常
用户注册异常处理钩子
用户注册异常处理函数类型定义的异常处理函数钩子,记录异常信息。
输入:类型为ExcProcFunc的钩子函数。
处理:将用户注册的钩子函数注册到OS框架里,发生异常时调用。
输出:
- 成功:注册成功。
- 失败:返回错误码。
CPU占用率
获取当前cpu占用率
通过本接口获取当前cpu占用率。
输入:无。
处理:采用基于IDLE计数的统计算法,统计结果会有一定误差,误差不超过百分之五。
输出:
- 成功:返回当前的cpu占用率[0,10000]。
- 失败:返回错误码。
获取指定个数的线程的CPU占用率
根据用户输入的线程个数,获取指定个数的线程CPU占用率。
输入: 线程个数、缓冲区指针、实际线程个数指针。
处理:
- 采用基于 IDLE 计数的统计算法,统计结果会有一定误差,误差不超过百分之五。
- 当配置项中的采样周期值等于0时,线程级CPUP采样周期为两次调用该接口或者PRT_CpupNow之间的间隔。否则,线程级CPUP采样周期为配置项中的OS_CPUP_SAMPLE_INTERVAL大小。
- 输出的实际线程个数不大于系统中实际的线程个数(任务个数和一个中断线程)。
- 若在一个采样周期内有任务被删除,则统计的任务线程和中断线程CPUP总和小于10000。
输出:
- 成功:在缓冲区写入cpu占用率。
- 失败:返回错误码。
设置CPU占用率告警阈值
根据用户配置的 CPU 占用率告警阈值 warn 和告警恢复阈值 resume,设置告警和恢复阈值。
输入:告警阈值、恢复阈值。
处理:设置 CPUP 告警阈值和恢复阈值
输出:
- 成功:设置成功。
- 失败:返回错误码。
查询CPUP告警阈值和告警恢复阈值
根据用户配置的告警阈值指针 warn 和告警恢复阈值指针 resume,查询告警阈值和告警恢复阈值。
输入:告警阈值指针、恢复阈值指针。
处理:获取 CPUP 告警阈值和恢复阈值,赋值指针变量。
输出:
- 成功:获取成功。
- 失败:返回错误码。
注册CPUP告警回调函数
根据用户配置的回调函数 hook,注册 CPUP 告警回调函数。
输入:类型为 CpupHookFunc 的 CPU 告警回调函数。
处理:将用户的钩子函数注册到 OS 框架。
输出:
- 成功:注册成功。
- 失败:错误码
OS启动
main函数入口:
二进制执行文件函数入口。
输入:无
输出:
- 成功:返回OK。
- 失败:错误码
用户业务入口
PRT_AppInit 用户业务函数入口,在 main 函数后调用,在此函数中添加业务功能代码。
输入:无
输出:
- 成功:返回OK。
- 失败:错误码
硬件驱动初始化入口
PRT_HardDrvInit 硬件驱动初始化函数入口,在 main 函数后调用,在此函数中添加板级驱动初始化功能代码。
输入:无
输出:
- 成功:返回OK。
- 失败:错误码
硬件启动流程入口
PRT_HardBootInit 在 OS 启动时调用,在main函数前被调用,可以用于 BSS 初始化、随机值设置等。
输入:无
输出:
- 成功:返回OK。
- 失败:错误码。
openamp
初始化openamp资源函数
初始化保留内存,初始化 remoteproc、virtio、rpmsg,建立 Uniproton 与 Linux 两端配对的 endpoint,供消息收发使用。
输入:无。
输出:
- 成功:初始化成功。
- 失败:错误码。
消息接收函数
接收消息,并触发SGI中断
输入:
- 类型为 unsigned char * 的存储消息的缓冲区。
- 类型为 int 的消息预期长度。
- 类型为 int *,用于获取消息实际长度。
输出:
- 成功:消息接收成功。
- 失败:错误码。
消息发送函数
发送消息和SGI中断
输入:类型为 unsigned char * 的存储消息的缓冲区、类型为 int 的消息长度。
输出:
- 成功:消息发送成功。
- 失败:错误码。
释放openamp资源
用于释放openamp资源。
输入:无
输出:
- 成功:资源释放成功。
- 失败:错误码。
POSIX接口
任务管理
pthread_attr_init
pthread_attr_init() 函数初始化一个线程对象的属性,需要用 pthread_attr_destroy() 函数对其去除初始化。
参数:指向一个线程属性结构的指针attr,结构中的元素分别对应着新线程的运行属性。
输出:
- 0:初始化成功。
- ENOMEM:内存不足,无法初始化线程属性对象。
- EBUSY:attr是以前初始化但未销毁的线程属性。
pthread_attr_destroy
pthread_attr_destroy()函数应销毁线程属性对象。被销毁的attr属性对象可以使用pthread_attr_init()重新初始化;在对象被销毁后引用该对象的结果是未定义的。
参数:指向一个线程属性结构的指针attr。
输出:
- 0:函数销毁对象成功。
- EINVAL:attr指向的是未初始化的线程属性对象。
pthread_attr_setstackaddr
pthread_attr_setstackaddr()函数设置attr对象中的线程创建堆栈addr属性。堆栈addr属性指定用于创建线程堆栈的存储位置。
输入:指向一个线程属性结构的指针attr、 栈地址stackaddr。
输出:
- 0:设置成功。
- EINVAL:attr指向的是未初始化的线程属性对象。
pthread_attr_getstackaddr
pthread_attr_getstackaddr()如果成功,函数将堆栈地址属性值存储在堆栈地址中。
参数:指向一个线程属性结构的指针attr、栈地址stackaddr.
输出:
- 0:获取成功。
- EINVAL:attr指向的是未初始化的线程属性对象。
pthread_attr_getstacksize
pthread_attr_getstacksize()和pthread_attr_setstacksize()函数分别应获取和设置 attr 对象中的线程创建堆栈大小属性(以字节为单位)。
参数:
- 指向一个线程属性结构的指针attr.
- 栈大小指针stacksize,指向设置或获取的堆栈大小。
输出:
- 0:获取成功。
- EINVAL:attr指向的是未初始化的线程属性对象。
pthread_attr_setstacksize
设置attr对象中的线程创建堆栈大小属性。
参数:
- 指向一个线程属性结构的指针attr。
- 栈大小指针stacksize,指向设置或获取的堆栈大小。
输出:
- 0:设置成功。
- EINVAL:堆栈size小于最小值或超过限制。
pthread_attr_getinheritsched
获取线程的继承属性。
参数:
- 指向一个线程属性结构的指针attr。
- 线程的继承性指针inheritsched。
输出:
- 0:获取成功。
- EINVAL:attr指向的是未初始化的线程属性对象。
pthread_attr_setinheritsched
设置线程的继承属性。可设置如下参数:
- PTHREAD_INHERIT_SCHED:指定线程调度属性应继承自创建线程,并且应忽略此attr参数中的调度属性。
- PTHREAD_EXPLICIT_SCHED:指定线程调度属性应设置为此属性对象中的相应值。
参数:
- 指向一个线程属性结构的指针attr。
- 线程的继承性inheritsched。
输出:
- 0:设置成功。
- EINVAL:继承的值无效,或attr指向的是未初始化的线程属性对象。
- ENOTSUP:试图将属性设置为不支持的值。
pthread_attr_getschedpolicy
获取调度策略属性,策略支持SCHED_FIFO。当使用调度策略SCHED_FIFO执行的线程正在等待互斥体时,互斥体解锁,它们应按优先级顺序获取互斥体。
参数:
- 指向一个线程属性结构的指针attr。
- 线程的调度策略指针policy。
输出:
- 0:获取成功。
- attr:指向的是未初始化的线程属性对象。
pthread_attr_setschedpolicy
设置调度策略属性,策略支持SCHED_FIFO。当使用调度策略SCHED_FIFO执行的线程正在等待互斥体时,互斥体解锁时,它们应按优先级顺序获取互斥体。
参数:
- 指向一个线程属性结构的指针attr。
- 线程的调度策略policy。
输出:
- 0:设置成功。
- EINVAL:policy的值无效,或者attr指向没有初始化的线程对象。
- ENOTSUP:试图将属性设置为不支持的值。
pthread_attr_getdetachstate
获取线程分离属性,分离状态应设置为PTHREAD_CREATE_DETAED或PTHREAD_CREATE_JOI无BLE。
参数:
- 指向一个线程属性结构的指针attr。
- 分离属性指针detachstate。
输出:
- 0:获取成功。
- EINVAL:attr指向没有初始化的线程对象。
pthread_attr_setdetachstate
设置线程分离属性。分离状态应设置为PTHREAD_CREATE_DETAED或PTHREAD_CREATE_JOI无BLE。
参数:
- 指向一个线程属性结构的指针attr。
- 分离属性detachstate。
输出:
- 0:设置成功。
- EINVAL:attr指向没有初始化的线程对象或分离状态的值无效。
pthread_attr_setschedparam
pthread_attr_setschedparam() 可用来设置线程属性对象的优先级属性。
参数:
- 指向一个线程属性结构的指针attr。
- 调度属性指针schedparam。
输出:
- 0:操作成功。
- EINVAL:参数不合法或attr未初始化。
- ENOTSUP:schedparam的优先级属性不支持。
pthread_attr_getschedparam
pthread_attr_getschedparam() 可用来获取线程属性对象的优先级属性。
参数:
- 指向一个线程属性结构的指针attr。
- 调度属性指针schedparam。
输出:
- 0:操作成功。
- EINVAL:参数不合法或attr未初始化。
pthread_create
pthread_create()函数创建一个新线程,其属性由 attr 指定。如果 attr 为 NULL,则使用默认属性。创建成功后,pthread_create()应将创建的线程的ID存储在参数 thread 的位置。
参数:
输出:
- 0:创建成功。
- EINVAL:attr指定的属性无效。
- EAGAIN:系统缺少创建新线程所需的资源,或者将超过系统对线程总数施加的限制。
- EPERM:调用者没有权限。
pthread_cancel
取消线程的执行。pthread_cancel()函数应请求取消线程。目标线程的可取消状态和类型决定取消何时生效。当取消被操作时,应调用线程的取消处理程序。
参数:线程的ID thread。
输出:
- 0:取消成功。
- ESRCH:找不到与给定线程ID相对应的线程。
pthread_testcancel
设置可取消状态。pthread_testcancel()函数应在调用线程中创建一个取消点。如果禁用了可取消性,pthread_testcancel()函数将无效。
参数:无
输出:无
pthread_setcancelstate
pthread_setcancelstate() 将调用线程的可取消性状态设置为 state 中给出的值。线程以前的可取消性状态返回到oldstate所指向的缓冲区中。state状态的合法值为PTHREAD_CANCEL_E无BLE和PTHREAD_CANCEL_DISABLE。
参数:
- 线程的可取消性状态 state。
- 之前的可取消状态 oldstate。
输出:
- 0:设置成功。
- EINVAL:指定的状态不是 PTHREAD_CANCEL_E无BLE 或 PTHREAD_CANCEL_DISABLE。
pthread_setcanceltype
pthread_setcanceltype()函数应原子地将调用线程的可取消类型设置为指定的类型,并在oldtype引用的位置返回上一个可取消类型。类型的合法值为PTHREAD_CANCEL_DEFERRED和PTHREAD_CANCEL_ASYNCHRONOUS。
输入:
- 线程的可取消类型type。
- 之前的可取消类型oldtype。
输出:
- 0:设置成功。
- EINVAL:指定的类型不是PTHREAD_CANCEL_DEFERRED或PTHREAD_CANCEL_ASYNCHRONOUS。
pthread_exit
线程的终止可以是调用 pthread_exit 或者该线程的例程结束。由此可看出,一个线程可以隐式退出,也可以显式调用 pthread_exit 函数来退出。pthread_exit 函数唯一的参数 value_ptr 是函数的返回代码,只要 pthread_join 中的第二个参数 value_ptr 不是NULL,这个值将被传递给 value_ptr。
参数:线程退出状态value_ptr,通常传NULL。
输出:None
pthread_cleanup_push
pthread_cleanup_push() 函数应将指定的取消处理程序推送到调用线程的取消堆栈上。pthread_cleanup_push必须和pthread_cleanup_pop同时使用。当push后,在线程退出前使用pop,便会调用清理函数。
参数:
- 取消处理程序入口地址 routine。
- 传递给处理函数的参数 arg。
输出:无
pthread_cleanup_pop
pthread_cleanup_pop()应删除调用线程取消处理程序,并可选择调用它(如果execute非零)。
参数:执行参数execute。
输出:无
pthread_setschedprio
pthread_setschedprio()函数应将线程 ID 指定的调度优先级设置为 prio 给出的值。如果 pthread_setschedprio()函数失败,则目标线程的调度优先级不应更改。
参数:
- 线程ID:thread。
- 优先级:prio。
输出:
- 0,设置成功。
- EINVAL:prio对指定线程的调度策略无效。
- ENOTSUP:试图将优先级设置为不支持的值。
- EPERM:调用者没有设置指定线程的调度策略的权限。
- EPERM:不允许将优先级修改为指定的值。
- ESRCH:thread指定的线程不存在。
pthread_self
pthread_self()函数应返回调用线程的线程ID。
参数:无
输出:返回调用线程的线程ID。
pthread_equal
此函数应比较线程ID t1和t2。
参数:
- 线程ID t1。
- 线程ID t2。
输出:
- 如果t1和t2相等,pthread_equal()函数应返回非零值。
- 如果t1和t2不相等,应返回零。
- 如果t1或t2不是有效的线程ID,则行为未定义。
sched_yield
sched_yield()函数应强制正在运行的线程放弃处理器,并触发线程调度。
参数:无
输出:输出0时,成功完成;否则应返回值-1。
sched_get_priority_max
sched_get_priority_max()和 sched_get_priority_min()函数应分别返回指定调度策略的优先级最大值或最小值。
参数:调度策略policy。
输出:
返回值:
- -1:失败。
- 返回优先级最大值。 errno:
- EINVAL:调度策略非法。
sched_get_priority_min
返回指定调度策略的优先级最小值
参数:调度策略policy。
输出:
返回值:
- -1:失败。
- 返回优先级最小值。 errno:
- EINVAL:调度策略非法。
pthread_join
pthread_join() 函数,以阻塞的方式等待 thread 指定的线程结束。当函数返回时,被等待线程的资源被收回。如果线程已经结束,那么该函数会立即返回。并且 thread 指定的线程必须是 joi无ble 的。当 pthread_join()成功返回时,目标线程已终止。对指定同一目标线程的pthread_join()的多个同时调用的结果未定义。如果调用pthread_join()的线程被取消,则目标线程不应被分离
参数:
- 线程ID:thread。
- 退出线程:返回值value_ptr。
输出:
- 0:成功完成。
- ESRCH:找不到与给定ID相对应的线程。
- EDEADLK:检测到死锁或thread的值指定调用线程。
- EINVAL:thread指定的线程不是joi无ble的。
pthread_detach
实现线程分离,即主线程与子线程分离,子线程结束后,资源自动回收。
参数:线程ID:thread。
输出:
- 0:成功完成。
- EINVAL:thread是分离线程。
- ESRCH:给定线程ID指定的线程不存在。
pthread_key_create
分配用于标识线程特定数据的键。pthread_key_create 第一个参数为指向一个键值的指针,第二个参数指明了一个 destructor 函数,如果这个参数不为空,那么当每个线程结束时,系统将调用这个函数来释放绑定在这个键上的内存块。
参数:
- 键值的指针key。
- destructor 函数入口 destructor。
输出:
- 0:创建成功。
- EAGAIN:系统缺乏创建另一个特定于线程的数据密钥所需的资源,或者已超过系统对每个进程的密钥总数施加的限制。
- ENOMEM:内存不足,无法创建密钥。
pthread_setspecific
pthread_setspecific() 函数应将线程特定的 value 与通过先前调用 pthread_key_create()获得的 key 关联起来。不同的线程可能会将不同的值绑定到相同的键上。这些值通常是指向已保留供调用线程使用的动态分配内存块的指针。
参数:
- 键值key。
- 指针value
输出:
- 0:设置成功。
- ENOMEM:内存不足,无法将非NULL值与键关联。
- EINVAL:key的值不合法。
pthread_getspecific
将与key关联的数据读出来,返回数据类型为 void *,可以指向任何类型的数据。需要注意的是,在使用此返回的指针时,需满足是 void 类型,虽指向关联的数据地址处,但并不知道指向的数据类型,所以在具体使用时,要对其进行强制类型转换。
参数:键值key。
输出:
- 返回与给定 key 关联的线程特定数据值。
- NULL:没有线程特定的数据值与键关联。
pthread_key_delete
销毁线程特定数据键。
参数:需要删除的键key。
输出:
- 0:删除成功。
- EINVAL:key值无效。
信号量管理
sem_init
sem_init()函数应初始化 sem 引用的匿名信号量。初始化信号量的值应为 value。在成功调用 sem_init()后,信号量可用于后续调用 sem_wait()、sem_timedwait()、sem_trywait()、sem_post()和sem_destroy()。此信号量应保持可用,直到信号量被销毁。
参数:
- 指向信号量指针sem。
- 指明信号量的类型pshared。
- 信号量值的大小value。
输出:
- 0:初始化成功。
- EINVAL:值参数超过{SEM_VALUE_MAX}。
- ENOSPC:初始化信号量所需的资源已耗尽,或已达到信号量的限制。
- EPERM:缺乏初始化信号量的权限。
sem_destroy
sem_destroy()函数销毁 sem 指示的匿名信号量。只有使用 sem_init()创建的信号量才能使用 sem_destroy()销毁;使用命名信号量调用 sem_destroy()的效果未定义。在 sem 被另一个对 sem_init()的调用重新初始化之前,后续使用信号量 sem 的效果是未定义的。
参数:指向信号量指针sem。
输出:
- 0:销毁成功。
- EINVAL:sem不是有效的信号量。
- EBUSY:信号量上当前有线程被阻止。
sem_open
创建并初始化有名信号量。此信号量可用于后续对 sem_wait()、sem_timedwait()、sem_trywait()、sem_post()和sem_close() 的调用。
参数:
信号量名无me指针。
oflag参数控制信号量是创建还是仅通过调用sem_open()访问。以下标志位可以在oflag中设置:
O_CREAT:如果信号量不存在,则此标志用于创建信号量。
O_EXCL:如果设置了O_EXCL和O_CREAT,且信号量名称存在,sem_open()将失败。如果设置了O_EXCL而未设置O_CREAT,则效果未定义。
如果在oflag参数中指定了O_CREAT和O_EXCL以外的标志,则效果未指定。
输出:
- 创建并初始化成功,返回信号量地址。
- EACCES:创建命名信号量的权限被拒绝。
- EEXIST:已设置O_CREAT和O_EXCL,且命名信号量已存在。
- EINTR:sem_open()操作被信号中断。
- EINVAL:给定名称不支持sem_open(),或在oflag中指定了O_CREAT,并且值大于最大值。
- EMFILE:当前使用的信号量描述符或文件描述符太多。
- ENAMETOOLONG:name参数的长度超过{PATH_MAX},或者路径名组件的长度超过{NAME_MAX}。
- ENFILE:系统中当前打开的信号量太多。
- ENOENT:未设置O_CREAT且命名信号量不存在。
- ENOSPC:没有足够的空间来创建新的命名信号量。
sem_close
关闭一个命名信号量。未命名的信号量(由sem_init() 创建的信号量)调用 sem_close() 的效果未定义。sem_close() 函数应解除系统分配给此信号量的任何系统资源。此过程后续使用sem指示的信号量的影响未定义。
参数:信号量指针sem。
输出:
- 0: 销毁成功。
- EINVAL:sem参数不是有效的信号量描述符。
sem_wait
sem_wait()函数通过对 sem 引用的信号量执行信号量锁定操作来锁定该信号量。如果信号量值当前为零,则调用线程在锁定信号量或调用被信号中断之前,不会从对 sem_wait()的调用返回。
参数:信号量指针sem。
输出:
- 0:操作成功。
- EAGAIN:信号量已被锁定,无法立即被 sem_trywait()操作。
- EDEADLK:检测到死锁条件。
- EINTR:信号中断了此功能。
- EINVAL:sem参数未引用有效的信号量。
sem_trywait
只有当信号量当前未锁定时,即信号量值当前为正值,sem_trywait()函数才应锁定 sem 引用的信号量。否则它不应锁定信号量。
参数:信号量指针sem。
输出:
- 0:操作成功。
- EAGAIN:信号量已被锁定,无法立即被sem_trywait()操作。
- EDEADLK:检测到死锁条件。
- EINTR:信号中断了此功能。
- EINVAL:sem参数未引用有效的信号量。
sem_timedwait
sem_timedwait()函数应锁定 sem 引用的信号量,就像 sem_wait()函数一样。如果在不等待另一个线程执行sem_post()解锁信号量的情况下无法锁定信号量,则在指定的超时到期时,此等待将终止。
参数:
- 信号量指针sem。
- 阻塞时间指针abs_timeout。
输出:
- 0:操作成功。
- EINVAL:线程可能会阻塞,abs_timeout 指定的纳秒值小于0或大于等于1000 million。
- ETIMEDOUT:在指定的超时到期之前,无法锁定信号量。
- EDEADLK:检测到死锁条件。
- EINTR:信号中断了此功能。
- EINVAL:sem参数未引用有效的信号量。
sem_post
sem_post()函数应通过对 sem 引用的信号量执行信号量解锁操作,当有线程阻塞在这个信号量上时,调用这个函数会使其中一个线程不在阻塞,选择机制是有线程的调度策略决定的。
参数:信号量指针sem。
输出:
- 0:操作成功。
- EINVAL:sem参数未引用有效的信号量。
sem_getvalue
sem_getvalue()函数获取 sem 引用的信号量的值,而不影响信号量的状态。获取的 sval 值表示在调用期间某个未指定时间发生的实际信号量值。
参数:
- 信号量指针sem。
- 信号量计数值指针sval。
输出:
- 0:操作成功。
- EINVAL:sem参数未引用有效的信号量。
互斥量管理
pthread_mutexattr_init
pthread_mutexattr_init()函数初始化互斥锁。如果调用 pthread_mutexattr_init()指定已初始化的attr属性对象行为未定义。
参数:互斥锁属性对象指针attr。
输出:
- 0:操作成功。
- ENOMEM:内存不足,无法初始化互斥属性对象。
pthread_mutexattr_destroy
注销一个互斥锁。销毁一个互斥锁即意味着释放它所占用的资源,且要求锁当前处于开放状态。
参数:互斥锁属性对象指针attr。
输出:
- 0:操作成功。
- EINVAL:attr指定的值无效。
pthread_mutexattr_settype
pthread_mutexattr_settype()函数设置互斥 type 属性。默认值为 PTHREAD_MUTEX_DEFAULT。有效的互斥类型包括:
PTHREAD_MUTEX_NORMAL:此类型的互斥锁不会检测死锁。
- 如果线程在不解除互斥锁的情况下尝试重新锁定该互斥锁,则会产生死锁。
- 如果尝试解除由其他线程锁定的互斥锁,会产生不确定的行为。
- 如果尝试解除锁定的互斥锁未锁定,则会产生不确定的行为。
PTHREAD_MUTEX_ERRORCHECK:此类型的互斥锁可提供错误检查。
- 如果线程在不解除锁定互斥锁的情况下尝试重新锁定该互斥锁,则会返回错误。
- 如果线程尝试解除锁定的互斥锁已经由其他线程锁定,则会返回错误。
- 如果线程尝试解除锁定的互斥锁未锁定,则会返回错误。
PTHREAD_MUTEX_RECURSIVE:
- 如果线程在不解除锁定互斥锁的情况下尝试重新锁定该互斥锁,则可成功锁定该互斥锁。 与 PTHREAD_MUTEX_NORMAL 类型的互斥锁不同,对此类型互斥锁进行重新锁定时不会产生死锁情况。多次锁定互斥锁需要进行相同次数的解除锁定才可以释放该锁,然后其他线程才能获取该互斥锁。
- 如果线程尝试解除锁定的互斥锁已经由其他线程锁定,则会返回错误。
- 如果线程尝试解除锁定的互斥锁未锁定,则会返回错误。
PTHREAD_MUTEX_DEFAULT:
- 如果尝试以递归方式锁定此类型的互斥锁,则会产生不确定的行为。
- 对于不是由调用线程锁定的此类型互斥锁,如果尝试对它解除锁定,则会产生不确定的行为。
- 对于尚未锁定的此类型互斥锁,如果尝试对它解除锁定,也会产生不确定的行为。
参数:
- 互斥锁属性对象指针attr。
- 互斥锁类型type。
输出:
- 0:操作成功。
- EINVAL:attr指定的值无效,或type无效。
pthread_mutexattr_gettype
pthread_mutexattr_gettype() 可用来获取由 pthread_mutexattr_settype() 设置的互斥锁的 type 属性。
参数:
- 互斥锁属性对象指针attr。
- 互斥锁类型指针type。
输出:
- 0:操作成功。
- EINVAL:attr指定的值无效。
pthread_mutexattr_setprotocol
pthread_mutexattr_setprotocol() 可用来设置互斥锁属性对象的协议属性。定义的 protocol 可以为以下值之一:
- PTHREAD_PRIO_NONE
- PTHREAD_PRIO_INHERIT
- PTHREAD_PRIO_PROTECT(当前版本暂不支持)
参数:
- 互斥锁属性对象指针 attr。
- 互斥锁属性对象的协议 protocol。
输出:
- 0:操作成功。
- ENOTSUP:协议指定的值不支持。
- EINVAL:attr指定的值无效。
- EPERM:调用者没有权限。
pthread_mutexattr_getprotocol
pthread_mutexattr_getprotocol() 获取互斥锁属性对象的协议属性。
参数:
- 互斥锁属性对象指针attr。
- 互斥锁属性对象的协议指针protocol。
输出:
- 0:操作成功。
- EINVAL:attr指定的值无效。
- EPERM:调用者没有权限。
pthread_mutex_init
pthread_mutex_init()函数初始化互斥锁,属性由 attr 指定。如果 attr 为NULL,则使用默认互斥属性。
参数:
- 互斥锁指针mutex。
- 互斥锁属性对象指针attr。
输出:
- 0:操作成功。
- EAGAIN:缺少初始化互斥锁所需的资源(内存除外)。
- ENOMEM:内存不足,无法初始化互斥体。
- EPERM:没有执行操作的权限。
- EBUSY:互斥锁已经初始化但尚未销毁。
- EINVAL:attr指定的值无效。
pthread_mutex_destroy
pthread_mutex_destroy() 用于注销一个互斥锁。销毁一个互斥锁即意味着释放它所占用的资源,且要求锁当前处于开放状态。
参数:互斥锁指针mutex。
输出:
- 0:操作成功。
- EBUSY:锁当前未处于开放状态。
- EINVAL:mutex指定的值无效。
pthread_mutex_lock
当pthread_mutex_lock() 返回时,该互斥锁已被锁定。线程调用该函数让互斥锁上锁,如果该互斥锁已被另一个线程锁定和拥有,则调用该线程将阻塞,直到该互斥锁变为可用为止。
参数:互斥锁指针mutex。
输出:
- 0:操作成功。
- EINVAL:mutex指定的值未初始化。
- EAGAIN:无法获取互斥锁。
- EDEADLK:当前线程已经拥有互斥锁。
pthread_mutex_trylock
pthread_mutex_trylock() 语义与 pthread_mutex_lock() 类似,不同点在于锁已经被占据时返回 EBUSY, 而非挂起等待。
参数:互斥锁指针mutex。
输出:
- 0,操作成功。
- EBUSY:mutex指定的锁已经被占据。
- EINVAL:mutex指定的值未初始化。
- EAGAIN:无法获取互斥锁。
- EDEADLK:当前线程已经拥有互斥锁。
pthread_mutex_timedlock
pthread_mutex_timedlock() 语义与pthread_mutex_lock() 类似,不同点在于锁已经被占据时增加一个超时时间,等待超时返回错误码。
参数:
- 互斥锁指针mutex。
- 超时时间指针abs_timeout。
输出:
- 0:操作成功。
- EINVAL:mutex指定的值未初始化,abs_timeout指定的纳秒值小于0或大于等于1000 million。
- ETIMEDOUT:等待超时。
- EAGAIN:无法获取互斥锁。
- EDEADLK:当前线程已经拥有互斥锁。
pthread_mutex_unlock
释放互斥锁。
参数:互斥锁指针mutex。
输出:
- 0:操作成功。
- EINVAL:mutex指定的值未初始化。
- EPERM:当前线程不拥有互斥锁。
读写锁编程
pthread_rwlock_init
pthread_rwlock_init()初始化读写锁。如果 attr 为 NULL,则使用默认的读写锁属性。一旦初始化,锁可以使用任何次数,而无需重新初始化。调用 pthread_rwlock_init()指定已初始化的读写锁行为未定义。如果在没有初始化的情况下使用读写锁,则结果是未定义的。
参数:
- 读写锁指针rwlock。
- 读写锁属性指针attr。
输出:
- 0:操作成功。
- EAGAIN:系统缺少初始化读写锁所需的资源(内存除外)。
- ENOMEM:内存不足,无法初始化读写锁。
- EPERM:没有执行操作的权限。
- EBUSY:rwlock是以已初始化但尚未销毁的读写锁。
- EINVAL:attr指定的值无效。
pthread_rwlock_destroy
pthread_rwlock_destroy()函数应销毁 rwlock 引用的读写锁,并释放锁使用的资源。在再次调用pthread_rwlock_init()重新初始化锁之前,后续使用锁的行为未定义。如果在任何线程持有 rwlock 时调用pthread_rwlock_destroy()行为未定义。尝试销毁未初始化的读写锁行为未定义。
参数:读写锁指针rwlock。
输出:
- 0:操作成功。
- EBUSY: rwlock引用的对象被锁定时销毁该对象。
- EINVAL:attr指定的值无效。
pthread_rwlock_rdlock
pthread_rwlock_rdlock()函数应将读锁应用于rwlock引用的读写锁。
参数:读写锁指针rwlock。
输出:
- 0:操作成功。
- EINVAL:rwlock是未初始化的读写锁。
- EAGAIN:无法获取读锁,因为已超过rwlock的最大读锁数。
- EDEADLK:检测到死锁条件或当前线程已拥有写锁。
pthread_rwlock_tryrdlock
pthread_rwlock_tryrdlock()函数语义与pthread_rwlock_rdlock()类似。在任何情况下,pthread_rwlock_tryrdlock()函数都不会阻塞;它会一直获取锁,或者失败并立即返回。
参数:读写锁指针rwlock。
输出:
- 0:操作成功。
- EINVAL:rwlock是未初始化的读写锁。
- EAGAIN:无法获取读锁,因为已超过rwlock的最大读锁数。
- EBUSY:无法获取读写锁以进行读取,因为写入程序持有该锁。
pthread_rwlock_timedrdlock
pthread_rwlock_timedrdlock()语义与pthread_rwlock_rdlock()类似,不同的是在锁已经被占据时增加一个超时时间,等待超时返回错误码。
参数:
- 读写锁指针rwlock。
- 超时时间指针abs_timeout。
输出:
- 0:操作成功。
- ETIMEDOUT:在指定的超时到期之前,无法获取锁。
- EAGAIN:无法获取读锁,超过锁的最大读锁数量。
- EDEADLK:检测到死锁条件或调用线程已在rwlock上持有写锁。
- EINVAL:rwlock指定的锁未初始化,或者abs_timeout纳秒值小于0或大于等于1000 million。
pthread_rwlock_wrlock
pthread_rwlock_wrlock()函数将写锁应用于 rwlock 引用的读写锁。如果没有其他线程持有读写锁 rwlock,调用线程将获得写锁。否则,线程应阻塞,直到它能够获得锁。如果调用线程在调用时持有读写锁(无论是读锁还是写锁),则调用线程可能会死锁。
参数:读写锁指针rwlock。
输出:
- 0:操作成功。
- EINVAL:rwlock指定的值未初始化。
- EDEADLK:检测到死锁情况,或者当前线程已经拥有用于写入或读取的读写锁。
pthread_rwlock_trywrlock
pthread_rwlock_trywrlock()函数类似 pthread_rwlock_wrlock(),但如果任何线程当前持有rwlock(用于读取或写入,该函数将失败)。
参数:读写锁指针rwlock。
输出:
- 0:操作成功。
- EBUSY:无法获取读写锁以进行写入,因为它已被锁定以进行读取或写入。
- EINVAL:rwlock指定的值未初始化。
pthread_rwlock_timedwrlock
pthread_rwlock_timedwrlock()语义与pthread_rwlock_wrlock()类似,不同的是在锁已经被占据时增加一个超时时间,等待超时返回错误码。
参数:
- 读写锁指针rwlock。
- 超时时间指针abs_timeout。
输出:
- 0:操作成功。
- ETIMEDOUT:在指定的超时到期之前,无法获取锁。
- EAGAIN:无法获取读锁,超过锁的最大读锁数量。
- EDEADLK:检测到死锁条件或调用线程已在rwlock上持有写锁。
- EINVAL;rwlock指定的锁未初始化,或者abs_timeout纳秒值小于0或大于等于1000 million。
pthread_rwlock_unlock
pthread_rwlock_unlock()函数释放rwlock引用的读写锁上持有的锁。如果读写锁rwlock未被调用线程持有,则结果未定义。
参数:读写锁指针rwlock。
输出:
- 0:操作成功。
- EINVAL:rwlock指定的锁未初始化。
- EPERM:当前线程不持有读写锁。
时钟管理
clock_gettime
clock_gettime()函数应返回指定时钟的当前值tp。
参数:
- 时钟类型clock_id。
- timespec结构体指针tp。
输出:
返回值:
- 0:操作成功。
- -1:操作失败。 errno:
- EINVAL:clock_id不合法。
- ENOTSUP:clock_id不支持。
clock_settime
clock_settime()函数应将指定的clock_id设置为tp指定的值。
参数:
- 时钟类型clock_id。
- timespec结构体指针tp。
输出:
返回值:
- 0:操作成功。
- -1:操作失败。 errno:
- EINVAL:clock_id不合法,或tp参数指定的纳秒值小于0或大于等于1000 million。
- ENOTSUP:clock_id不支持。
clock_getres
clock_getres()返回时钟的分辨率。如果参数res不为NULL,则指定时钟的分辨率应存储在res指向的位置。如果res为NULL,则不返回时钟分辨率。如果clock_settime()的时间参数不是res的倍数,则该值将被截断为res的倍数。
参数:
- 时钟类型clock_id。
- timespec结构体指针res。
输出:
返回值:
- 0:操作成功。
- -1:操作失败。 errno:
- EINVAL:clock_id不合法。
- ENOTSUP:clock_id不支持。
nanosleep
nanosleep()函数应导致当前线程暂停执行,直到rqtp参数指定的时间间隔过去或信号传递到调用线程。挂起时间可能比请求的长,因为参数值被四舍五入到睡眠分辨率的整数倍,或者因为系统调度了其他活动。但是,除被信号中断外,暂停时间不得小于rqtp规定的时间。
如果rmtp参数是非NULL,则更新其为剩余的时间量(请求的时间减去实际睡眠时间)。如果rmtp参数为NULL,则不返回剩余时间。
参数:
- timespec结构体指针rqtp。
- timespec结构体指针rmtp。
输出:
返回值:
- 0:操作成功。
- -1:操作失败。 errno:
- EINVAL:rqtp参数指定的纳秒值小于0或大于等于1000 million。
- EINTR:信号中断。
sleep
sleep()函数应导致调用线程暂停执行,直到参数seconds指定的实时秒数过去或信号被传递到调用线程。由于系统安排了其他活动,暂停时间可能比请求的要长。
参数: 秒数seconds。
输出:
- 0:操作成功。
- 如果由于信号的传递而返回,则返回值应为“未睡眠”量,以秒为单位。
timer_create
timer_create()函数使用指定的时钟clock_id作为时序基创建计时器,在timerid引用的位置返回计时器ID,用于标识计时器。在删除计时器之前,此计时器ID在调用过程中应是唯一的。
参数:
- 时钟类型clock_id。
- sigevent结构体指针evp。(仅支持SIGEV_THREAD)
- 定时器ID指针timerid。
输出:
- 0:操作成功。
- EINVAL:clock_id不合法。
- EAGAIN:系统缺少足够的资源来满足请求。
- EINVAL:指定的时钟ID未定义。
- ENOTSUP:不支持创建附加到clock_id时钟上的计时器。
timer_delete
删除定时器。
参数:定时器ID指针timerid。
输出:
- 0:操作成功。
- EINVAL:timerid不合法。
timer_settime
如果value的it_value成员非0,timer_settime()函数从value参数的it_value成员设置timerid指定的计时器的到期时间。如果在调用timer_settime()时指定的计时器已启用,则此调用应将下次到期的时间重置为指定的值。如果value的it_value成员为0,则应解除计时器。
参数:
- 定时器ID timerid。
- 计时器的特征flag。
- itimerspec结构体指针value。
- itimerspec结构体指针ovalue。返回上一次计时器设置超时时间。
输出:
- 0:操作成功。
- EINVAL:timerid不合法。
timer_gettime
timer_gettime() 函数存储定时器 timerid 的剩余时间以及间隔。value 的 it_value 成员包含计时器到期前的时间量,如果计时器已解除,则为零。value 的 it_interval 成员将包含 timer_settime() 上次设置的间隔时间。
参数:
- 定时器ID timerid。
- itimerspec结构体指针value。
输出:
- 0:操作成功。
- EINVAL:timerid不合法。
内存管理
malloc
malloc()分配大小(以字节为单位)size 的未使用的空间。
参数:大小size。
输出:分配成功时,返回指向分配空间的指针。
- 如果size 为0,则返回空指针或可以成功传递给 free()的唯一指针。
- 否则它将返回一个空指针,并设置 errno 来指示错误:ENOMEM 存储空间不足。
free
Free()函数释放ptr指向的空间,即可供进一步分配。如果ptr是空指针,则不发生任何操作。如果空间已被对free()或realloc()的调用释放,则行为未定义。
参数:指针ptr。
输出:无





