安装与部署
硬件要求
- x86_64架构、AArch64架构
环境准备
- 安装 openEuler 系统,安装方法参考 《安装指南》。
1. ROS2
1. ros-humble
1. 安装ros-humble
安装ros-humble 软件包
shell[root@openEuler ~]# yum install openeuler-ros [root@openEuler ~]# yum install ros-noetic-*执行如下命令,查看安装是否成功。如果回显有对应软件包,表示安装成功。
shell[root@openEuler ~]# rpm -q ros-humble
2. ros-noetic
2. 安装ros-noetic
安装ros-noetic 软件包
shell[root@openEuler ~]# yum install openeuler-ros [root@openEuler ~]# yum install ros-noetic-*执行如下命令,查看安装是否成功。如果回显有对应软件包,表示安装成功。
shell[root@openEuler ~]# rpm -q ros-noetic
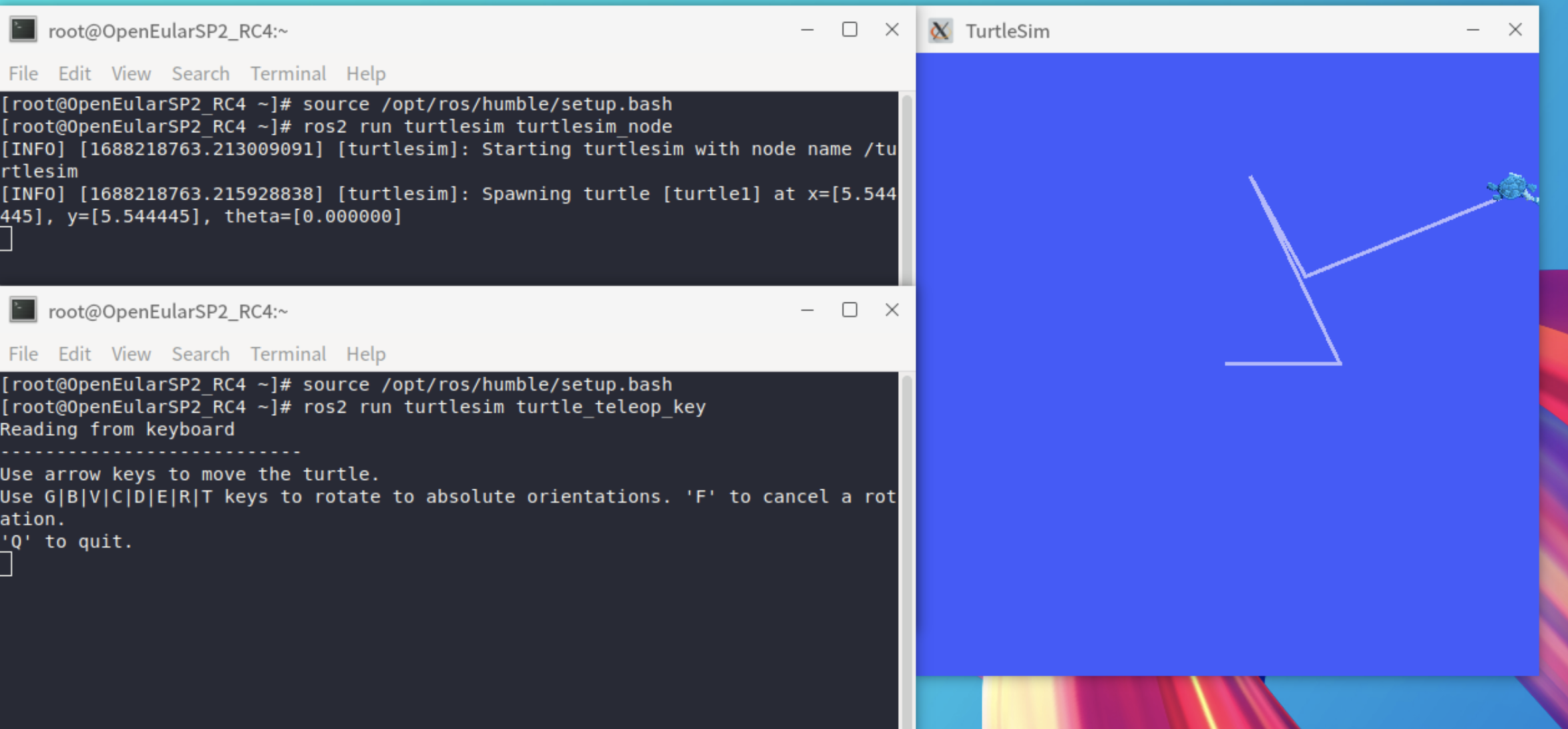
2. 测试 ros-humble
运行小乌龟
启动小乌龟
shell[root@openEuler ~]# source /opt/ros/humble/setup.bash [root@openEuler ~]# ros2 run turtlesim turtlesim_node打开小乌龟控制终端
shell[root@openEuler ~]# source /opt/ros/humble/setup.bash [root@openEuler ~]# ros2 run turtlesim turtle_teleop_key在乌龟控制终端中使用方向键控制乌龟运动
遵循 木兰宽松许可证第2版(MulanPSL2)

遵循木兰宽松许可证第2版(MulanPSL2)
版权所有 © 2025 openEuler 保留一切权利
文档捉虫