工作空间和功能包构建
在前面的章节中,我们已经安装好了openEuler系统和ROS2 Humble完整版。
本小节将介绍如何创建自己的工作空间构建代码,并简单测试节点间的Topic和Service通信。
创建工作空间
ROS 工作空间(workspace)是一个具有特定结构的目录,用来存放管理机器人代码开发过程中的所有资料。工作空间下通常会有一个 src 子目录,存放着 ROS 软件包的源代码,可以是我们下载的开源代码,也可以是我们自研的代码。
打开终端,输入以下命令创建一个名为“ros2_ws”的工作空间以及其下的src子目录:
mkdir -p ~/ros2_ws/src此时src目录下为空,下面我们下载ros_arm_tutorials仓库的代码到src目录下,作为后续测试节点通信的示例源代码:
cd ~/ros2_ws/src
git clone -b ros2-humble https://gitee.com/xiao_yun_wang/ros_arm_tutorials.git下载完成后,我们可以安装tree工具用来查看工作空间下的目录结构:
dnf install tree
tree -L 3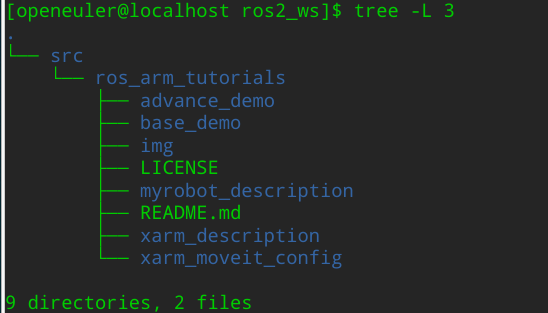
ros_arm_tutorials 的 ros2-humble 分支代码共包含以下五个功能包:
| 功能包(软件包) | 内容 |
|---|---|
| base_demo | 自定义消息和服务、topic发布/订阅节点、service服务端/客户端节点、参数操作示例节点 |
| advance_demo | action 的定义和服务端/客户端节点、ROS 常用工具、动态参数配置节点、TF2示例节点、RVIZ Marker发布和显示等 |
| myrobot_description | 三自由度机械臂和移动小车的URDF模型 |
| xarm_description | XBot-Arm 机械臂 URDF 模型文件包 |
| xarm_moveit_config | 使用配置助手生成的 XBot-Arm 机械臂 MoveIt! 配置和启动功能包 |
更多说明可参考原仓库
构建功能包
ROS2 使用 colcon 构建工具进行源代码的构建,更多信息可参考:设计文档
默认情况下,colcon 会创建以下目录作为 src 目录的同级目录:
build:存放中间文件。
install:每个软件包的安装目录。默认情况下,每个软件包都将安装到一个单独的子目录中。
log:日志目录包含有关每次调用 colcon 的各种日志信息。
由于 ament_cmake 等联编类型不支持开发空间的概念,需要安装软件包,因此 colcon 支持选项 --symlink-install。这允许通过更改源代码空间中的文件(如 Python 文件或其他非编译资源)来更改已安装的文件,从而加快迭代速度。
安装 colcon:
pip3 install -U pytest colcon-common-extensions在工作空间的根目录下,使用 colcon 构建功能包。
cd ~/ros2_ws/
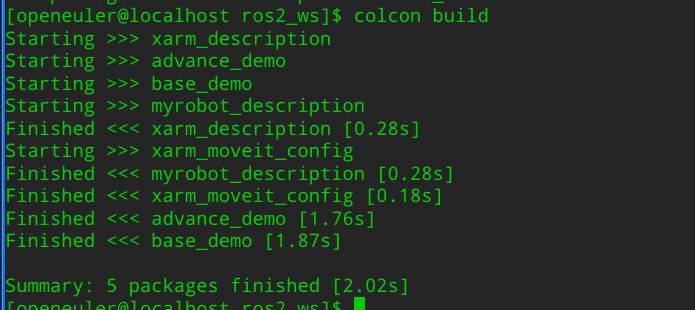
colcon build --symlink-install构建过程中因使用的 CMake 版本不一致等原因可能会出现一些 warning,可先忽略。
构建完成后会提示已经完成5个软件包的构建:
设置环境
执行source ~/ros2_ws/install/setup.bash设置环境,或者运行以下命令添加到.bashrc中。
echo "source ~/ros2_ws/install/setup.bash" >> ~/.bashrc
source ~/.bashrc测试Topic通信节点
ROS2基于分布式的设计,将复杂系统分为许多用于实现不同功能的模块化节点(进程)。不同节点之间通过消息传递数据。Topic话题通信是一种基于发布/订阅的异步通信机制,base_demo功能包中提供了Topic通信的示例代码节点。每个节点都提供了Python与Cpp两种编程方式的实现。
打开终端,输入以下命令启动话题发布端的Python节点或者CPP节点:
ros2 run base_demo topic_pub.pyor
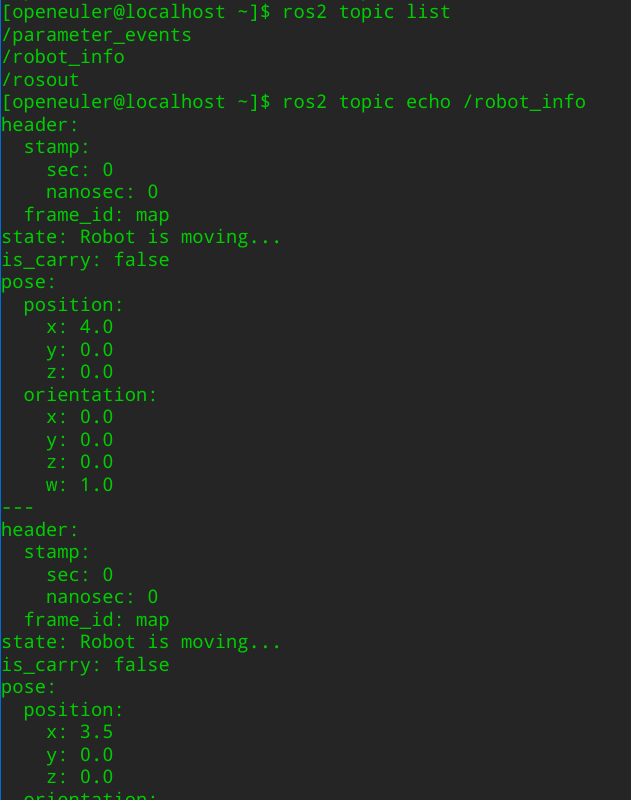
ros2 run base_demo topic_pub新开终端,输入ros2 topic list可以查看当前的话题列表,其中/robot_info是节点发布的话题。
输入ros2 topic echo /robot_info可以看到话题接收到的消息:
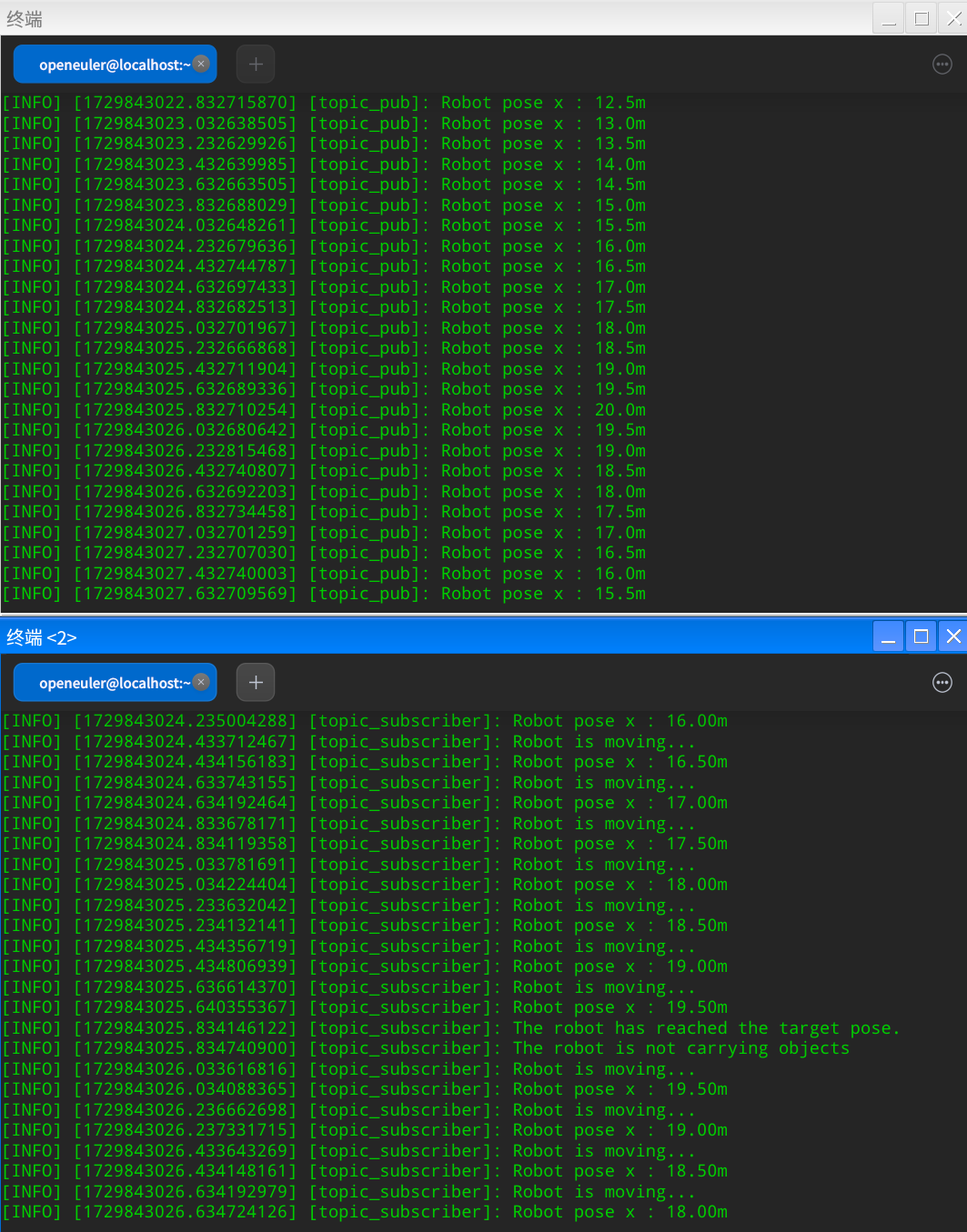
新开终端,输入以下命令启动话题订阅端的Python节点:
ros2 run base_demo topic_sub.py或者启动CPP节点:
ros2 run base_demo topic_sub节点启动后会接收话题消息并将消息数据处理后发布到终端显示:
测试Service通信节点
Service通信是一种基于请求/响应模式的同步通信方式。base_demo功能包中提供了Service通信的示例代码节点。每个节点都提供了Python与Cpp两种编程方式的实现。
打开终端,输入以下命令启动Service服务端的Python节点:
ros2 run base_demo service_server.py或者CPP节点:
ros2 run base_demo service_server新开终端,输入以下命令启动Service客户端的Python节点:
ros2 run base_demo service_client.py或者Cpp节点:
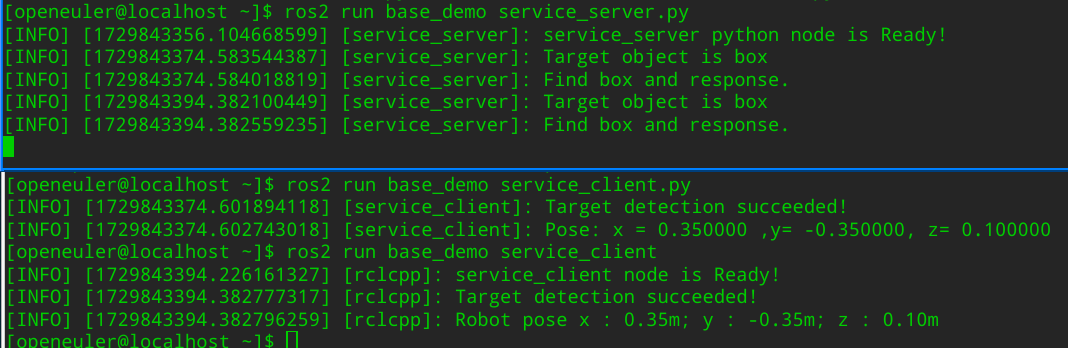
ros2 run base_demo service_client客户端节点启动后会向代码中自定义的服务发送请求,服务端接收到请求的信息后会进行处理并在终端提示“Target object is box”“find box and response”,同时反馈响应信息。
客户端节点接收到响应后会在终端显示相应的信息:
注意:本小节主要介绍工作空间的创建和代码包的构建,源码编写过程可参考。
大家可以参考此教程在openEuler系统上编译构建自己的ROS程序~
参考资料
遵循 木兰宽松许可证第2版(MulanPSL2)
