安装与部署
本教程将介绍如何安装测试已经随openEuler系统发版的ROS Humble和 ROS Noetic软件包。
openEuler ROS的开发测试可参考后续的基础教程各个专题教程。
在安装ROS Humble前,需确保已经安装好openEuler操作系统和系统桌面。
环境准备
- 安装 openEuler 系统,安装方法参考 《openEuler官方文档安装指南》。
安装ROS
ros2 humble
注意:
- 在openEuler 22.03系统上,输入
yum install openeuler-ros时会自动配置ROS软件源,无需手动配置 - 目前在openEuler 24.03以及其他系统版本上仍需手动添加软件源
- 为方便定位问题以及解决bug,openEuler 24.03的ROS软件源推荐使用本教程中设置的软件源,而非openEuler官方源
- 手动配置软件源时注意区分欧拉系统架构(x86、ARM or RISC-V)
1. 设置软件源
下面以openEuler24.03为例介绍软件源的配置过程。
输入以下命令在/etc/yum.repos.d/ROS.repo文件中配置软件源:
x86架构软件源配置:
bashbash -c 'cat << EOF > /etc/yum.repos.d/ROS.repo [openEulerROS-humble] name=openEulerROS-humble baseurl= https://eulermaker.compass-ci.openeuler.openatom.cn/api/ems1/repositories/ROS-SIG-Multi-Version_ros-humble_openEuler-24.03-LTS-TEST4/openEuler%3A24.03-LTS/x86_64/ enabled=1 gpgcheck=0 EOF'ARM架构软件源配置:
bashbash -c 'cat << EOF > /etc/yum.repos.d/ROS.repo [openEulerROS-humble] name=openEulerROS-humble baseurl=https://eulermaker.compass-ci.openeuler.openatom.cn/api/ems1/repositories/ROS-SIG-Multi-Version_ros-humble_openEuler-24.03-LTS-TEST4/openEuler%3A24.03-LTS/aarch64/ enabled=1 gpgcheck=0 EOF'RISC-V架构软件源配置:
bashbash -c 'cat << EOF > /etc/yum.repos.d/ROS.repo [openEulerROS-humble] name=openEulerROS-humble baseurl=https://build-repo.tarsier-infra.isrc.ac.cn/openEuler:/ROS/24.03/ enabled=1 gpgcheck=0 EOF'
2. 安装ros-humble
依次输入以下命令安装ROS Humble所有软件包:
dnf update
dnf install "ros-humble-*" --skip-broken --exclude=ros-humble-generate-parameter-library-example也可输入以下命令安装单独软件包:
yum install ros-humble-<package-name>
# or
dnf install ros-humble-<package-name>例如输入以下命令安装ROS Humble基础包和turtlesim包:
yum install ros-humble-ros-base ros-humble-turtlesim运行如下命令,查看安装是否成功。如果回显有对应软件包,表示安装成功:
[root@openEuler ~]# rpm -q ros-humble安装上述软件包后,编辑 ~/.bashrc 追加以下内容:
source /opt/ros/humble/setup.bash或者输入以下命令将上述语句写入 ~/.bashrc 文件:
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc随后输入source ~/.bashrc来激活ROS环境变量的设置。
3. 测试小乌龟
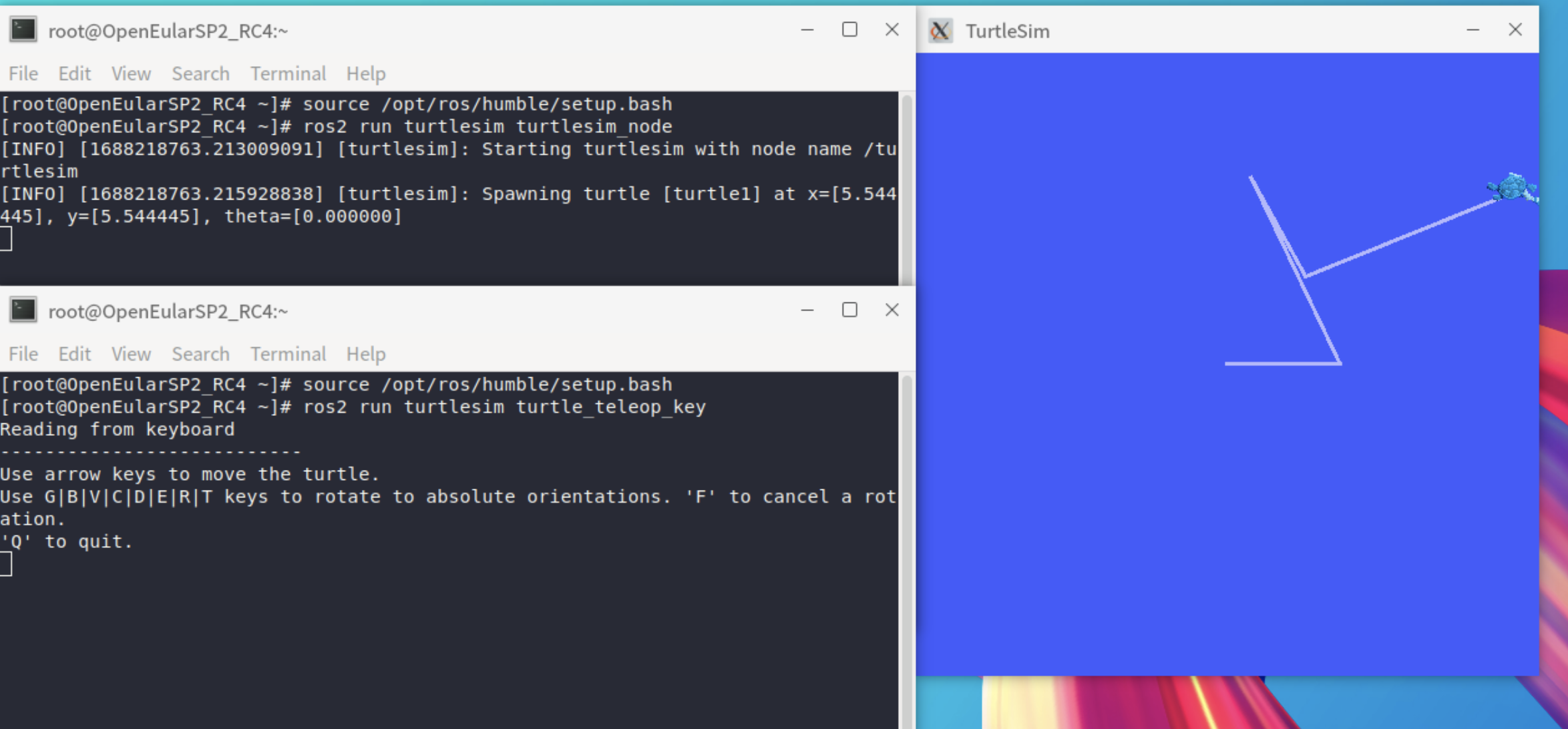
启动小乌龟
shell[root@openEuler ~]# source /opt/ros/humble/setup.bash [root@openEuler ~]# ros2 run turtlesim turtlesim_node打开小乌龟控制终端
shell[root@openEuler ~]# source /opt/ros/humble/setup.bash [root@openEuler ~]# ros2 run turtlesim turtle_teleop_key在乌龟控制终端中使用方向键控制乌龟运动
ros-noetic
1. 设置软件源
下面以openEuler 24.03为例介绍软件源的配置过程。
输入以下命令在/etc/yum.repos.d/ROS.repo文件中配置软件源:
- x86架构软件源配置:
bash -c 'cat << EOF > /etc/yum.repos.d/ROS.repo
[openEulerROS-Noetic]
name=openEulerROS-Noetic
baseurl=https://eulermaker.compass-ci.openeuler.openatom.cn/api/ems1/repositories/ROS-SIG-Multi-Version_ros-noetic_openEuler-24.03-LTS-TEST1/openEuler%3A24.03-LTS/x86_64/
enabled=1
gpgcheck=0
EOF'- ARM架构软件源配置:
bash -c 'cat << EOF > /etc/yum.repos.d/ROS.repo
[openEulerROS-Noetic]
name=openEulerROS-Noetic
baseurl=https://eulermaker.compass-ci.openeuler.openatom.cn/api/ems1/repositories/ROS-SIG-Multi-Version_ros-noetic_openEuler-24.03-LTS-TEST1/openEuler%3A24.03-LTS/aarch64/
enabled=1
gpgcheck=0
EOF'2. 安装ros-noetic
安装ros-noetic 软件包。
[root@openEuler ~]# yum install openeuler-ros
[root@openEuler ~]# yum install ros-noetic-*执行如下命令,查看安装是否成功。如果回显有对应软件包,表示安装成功。
[root@openEuler ~]# rpm -q ros-noetic安装上述软件包后,编辑 ~/.bashrc 追加以下内容。
[root@openEuler ~]# source /opt/ros/noetic/setup.bash或者输入以下命令将上述语句写入~/.bashrc文件。
[root@openEuler ~]# echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc随后输入source ~/.bashrc来激活ROS环境变量的设置。
3. 测试小乌龟
安装ROS后,打开终端输入以下命令启动小乌龟仿真测试:
rosrun turtlesim turtlesim_node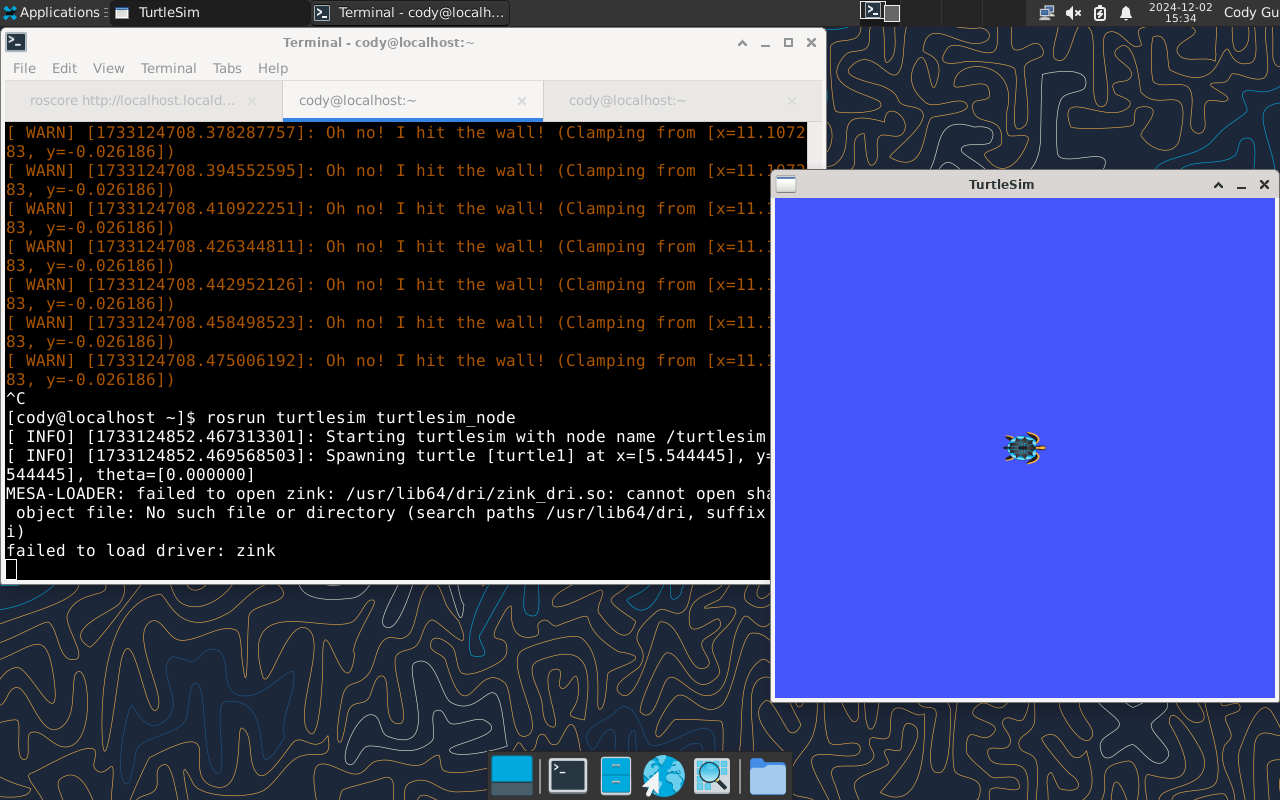
新开终端,输入以下命令启动键盘控制节点,在英文输入法下,可以根据终端提示按下键盘的上下左右键控制小乌龟运动:
rosrun turtlesim turtle_teleop_key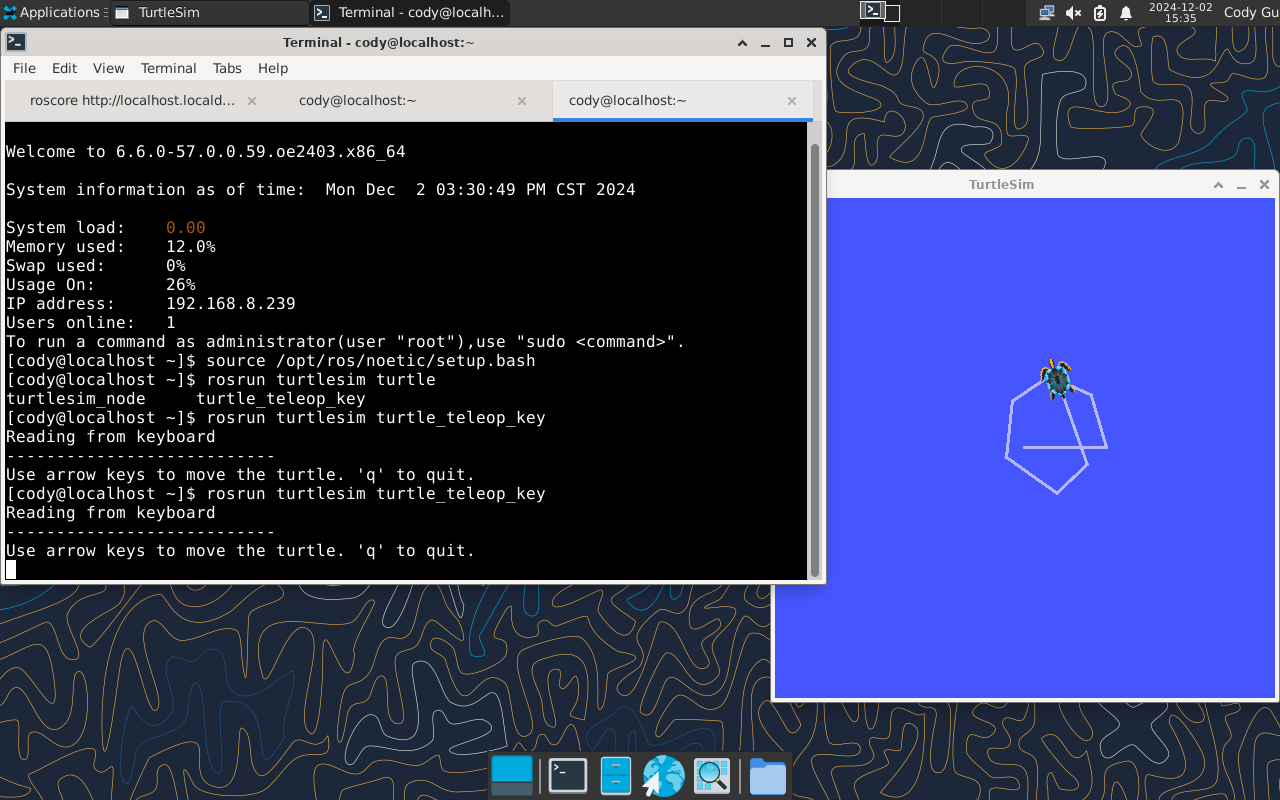
若小乌龟仿真测试通过,则说明openEuler ROS Noetic已成功安装。
遵循 木兰宽松许可证第2版(MulanPSL2)
